데이터 기반 모델 예측 제어의 안정성 및 강인성 보장
본 논문은 행동 시스템 이론에 기반한 Hankel 행렬을 이용해 사전 식별 없이 선형 시불변 시스템을 제어하는 데이터‑드리븐 MPC를 제안한다. 터미널 평등 제약을 포함한 명목형 스킴에서 무노이즈 상황의 지수 안정성을 증명하고, 출력 측정 노이즈가 존재할 때는 슬랙 변수와 정규화를 도입한 강인형 스킴을 설계하여 실용적 지수 안정성을 확보한다. 최초로 순환 가능성, 제약 만족 및 폐루프 안정성을 이론적으로 분석한 점이 주요 공헌이다.
저자: Julian Berberich, Johannes K"ohler, Matthias A. M"uller
본 논문은 선형 시불변(LTI) 시스템을 대상으로, 사전 모델 식별 없이 측정된 입력‑출력 데이터를 활용해 모델 예측 제어(MPC)를 구현하는 새로운 방법론을 제시한다. 서론에서는 기존 데이터‑드리븐 제어 방법들이 안정성·제약 만족에 대한 이론적 보장을 제공하지 못하는 문제점을 지적하고, 행동 시스템 이론에 기반한 Hankel 행렬을 이용하면 시스템 궤적을 완전하게 재구성할 수 있음을 소개한다.
II절에서는 기본 정의와 기존 결과를 정리한다. 입력이 영구적으로 흥분(persistently exciting)된 경우, 길이 L+n의 Hankel 행렬 H_{L+n}(u_d), H_{L+n}(y_d)와 가중치 벡터 α를 이용해 임의의 입력‑출력 궤적을 선형 결합(식 (1))으로 표현할 수 있음을 Theorem 1으로 제시한다. 이는 시스템의 내부 상태를 직접 알 필요 없이 외부 데이터만으로 미래 궤적을 예측할 수 있는 근거가 된다.
III절에서는 명목형 데이터‑드리븐 MPC 스킴을 설계한다. 목표 평형 (u_s, y_s)를 정의하고, 현재 시점까지의 n개의 입력‑출력 데이터를 초기 조건으로 사용한다. 최적화 문제(3)는 다음을 포함한다: (3b) 데이터 기반 동역학 제약, (3c) 현재 측정값과 예측값의 일치, (3d) 터미널 평등 제약(예측 궤적의 마지막 n 단계가 목표 평형과 일치), (3e) 입력·출력 제약. 비용은 quadratic stage cost ‖u−u_s‖_R²+‖y−y_s‖_Q²로 정의된다. 알고리즘 1에 따라 매 시간 단계마다 문제(3)를 풀고 첫 번째 입력을 적용한다.
III‑B절에서는 폐루프 특성을 분석한다. Assumption 1은 최적값 함수 J^*_L(x)가 2차 상한을 갖는다고 가정하고, 이는 폴리토프 제약과 LQR 구조에서 자연스럽게 만족된다. Assumption 2는 데이터 입력이 order L+2n 만큼 영구적으로 흥분함을 요구한다(터미널 제약 때문에 추가적인 n이 필요). Assumption 3은 예측 지평선 L이 시스템 차수 n 이상임을 명시한다. 이러한 가정 하에 Theorem 2를 증명한다. (i) 초기 feasible이면 모든 t에서 순환 가능, (ii) 입력·출력 제약이 항상 만족, (iii) 목표 평형이 지수적으로 안정한다. 증명은 표준 MPC와 동일하게, 이전 최적 해를 한 단계 이동하고 마지막 n 단계에 zero 입력을 추가하는 후보 해를 구성해 가치 함수 감소를 보이며, 터미널 평등 제약이 Lyapunov 함수 역할을 한다.
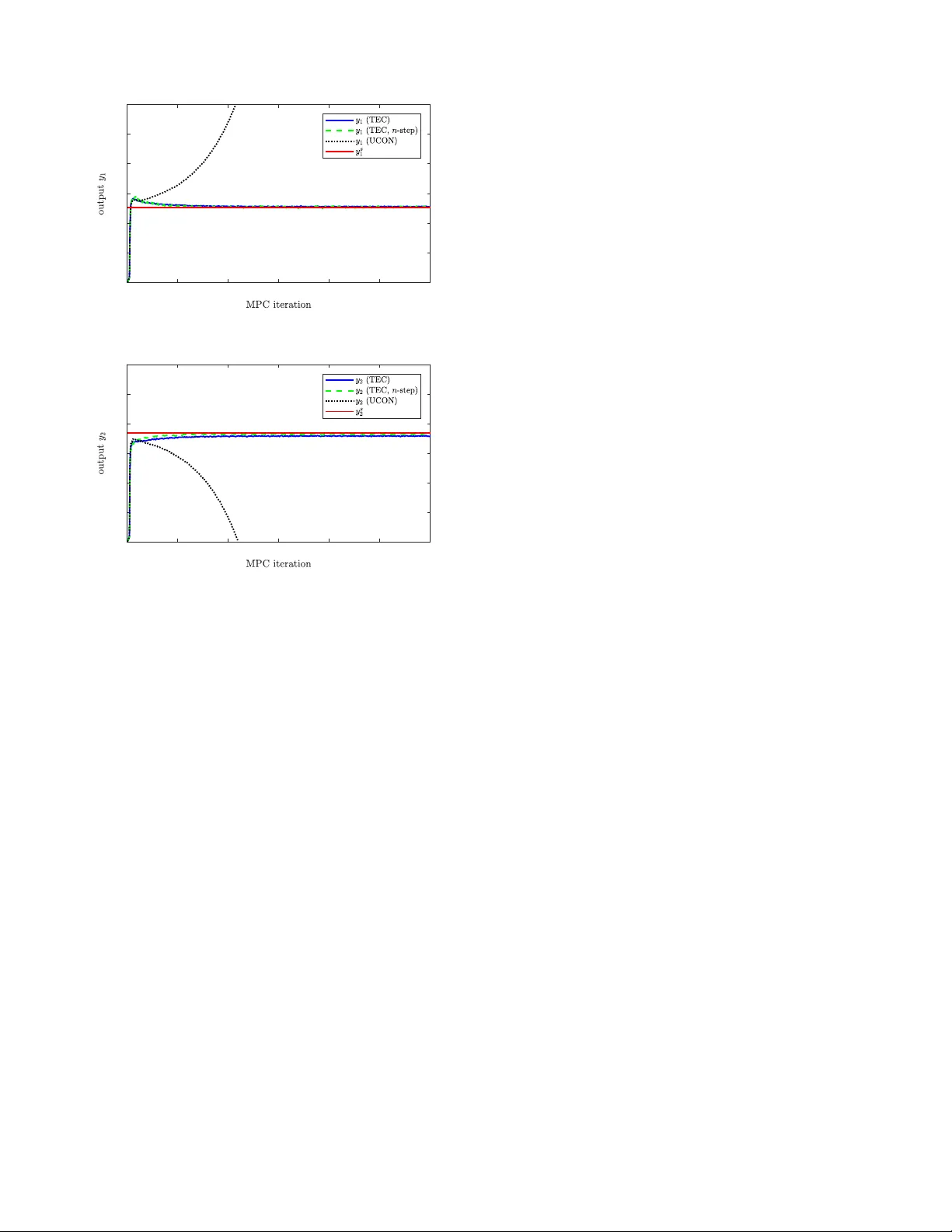
IV절에서는 출력 측정 노이즈가 존재할 때의 강인형 스킴을 제시한다. 실제 측정 ỹ_t = y_t + w_t (‖w_t‖≤δ)와 초기 데이터에도 동일한 노이즈가 포함된다고 가정한다. 이를 보정하기 위해 슬랙 변수 s_t와 정규화 파라미터 λ를 비용에 추가한다(식 (5)). 슬랙 변수는 터미널 평등 제약을 완화시켜 노이즈에 대한 여유를 제공한다. 강인형 MPC는 다중 단계 적용(multi‑step) 방식을 채택해, 매 단계마다 최적화를 수행하고, 일정 단계마다 슬랙을 재설정한다. Theorem 4는 적절한 설계 파라미터(λ, L, N 등) 하에 폐루프가 실용적 지수 안정성을 갖는다고 증명한다. 즉, 상태 ‖x_t‖는 시간에 따라 e^{-αt}·‖x_0‖+O(δ) 형태로 감소한다.
V절에서는 수치 예제를 통해 제안된 스킴을 검증한다. 2차 시스템에 대해 무터미널 스킴(
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기