협상 기반 차선 변경 권리양보 전략으로 안전과 효율 동시 확보
** 본 논문은 기존 책임‑민감 안전(RSS) 모델이 안전은 보장하지만 차선 변경 성공률이 낮은 문제를 해결하고자, 차량 간 권리양보를 협상으로 할당하는 공식화된 전략을 제안한다. 오른쪽 우선권을 ‘먼저 도착한 차량이 우선’(FCFS) 원칙에 따라 정의하고, 차선 변경 과정을 ‘간격 조정 → 협상 → 실행’의 세 단계로 나눈 뒤 각 단계별 안전 조건을 수식화한다. 시뮬레이션 결과, 제안 전략은 안전성을 유지하면서 RSS 대비 차선 변경 성공…
저자: Can Zhao, Zhiheng Li, Li Li
**
본 논문은 자동운전 차량(AV)의 차선 변경 과정에서 안전을 보장하면서도 교통 효율성을 높이기 위한 새로운 전략을 제시한다. 기존의 책임‑민감 안전(Responsibility‑Sensitive Safety, RSS) 모델은 안전성을 수학적으로 증명하는 데 강점을 가지고 있지만, 차선 변경 성공률이 낮고 보수적인 행동으로 인해 교통 흐름을 저해한다는 한계가 있다. 이를 극복하고자 저자들은 ‘우선권(right‑of‑way)’이라는 전통적인 교통 규칙 개념을 재정의하고, 차량 간 협상 메커니즘을 도입한 공식화된 차선 변경 전략을 설계하였다.
**1. 연구 배경 및 동기**
- 차선 변경은 전체 교통 사고의 약 27%를 차지하며, 특히 자동운전 시스템에서 안전 검증이 중요한 과제로 남아 있다.
- 기존 RSS는 “절대 안전”을 목표로 하여, 충돌 가능 영역을 크게 설정하고, 차량이 해당 영역에 진입하지 못하도록 제한한다. 이는 안전은 확보하지만, 실제 도로에서는 차선 변경 기회가 제한되어 효율성이 떨어진다.
- 인간 운전자는 신호등, 깜빡이, 가속·감속 등 암시적·명시적 의사소통을 통해 ‘우선권’을 동적으로 교환한다. 이러한 협상 과정은 교통 흐름을 원활하게 만들지만, 현재의 공식화된 AV 전략에는 반영되지 않았다.
**2. 우선권 정의 및 원칙**
논문은 ‘우선권’을 “특정 시공간 영역을 먼저 차지할 수 있는 우선적 권리”로 정의하고, 다음 네 가지 원칙을 제시한다.
1) 우선권은 충돌 가능성이 존재할 때만 발생한다.
2) 동일 시공간 영역에는 한 차량만이 소유권을 갖는다. 비소유자는 허가 없이는 해당 영역에 진입할 수 없다.
3) 소유자가 위반하면 비소유자는 책임이 없으며, 사고 책임은 소유자에게 전가된다.
4) 소유권은 ‘금지 구역(forbidden area)’과 ‘협상 가능 구역(negotiable area)’으로 구분된다. 금지 구역은 양도가 불가능하고, 협상 구역은 다른 차량과 협상을 통해 양도될 수 있다.
특히 ‘먼저 도착한 차량이 우선(First‑Come‑First‑Served, FCFS)’ 원칙을 적용해, 차량이 목표 영역에 먼저 도달하면 자동으로 우선권을 획득하도록 설계하였다. 이는 인간 운전자의 직관과 일치하며, 계산 복잡도가 낮아 실시간 적용이 가능하다.
**3. 차선 변경 프로세스 모델링**
차선 변경을 세 단계로 분할한다.
- **간격 조정 단계**: ego 차량은 현재 차선과 목표 차선의 앞·뒤 차량 위치·속도·가속도 정보를 수집한다. 식(1‑2)를 이용해 각 차량이 차선 변경 시 확보해야 할 최소 거리(l_fV)와 허용 가속도를 계산한다. 이를 통해 ‘협상 구역’의 크기를 정량화한다.
- **협상 단계**: ego 차량은 V2V 메시지(또는 암시적 신호)를 통해 주변 차량에게 권리양보를 요청한다. 모든 차량은 ‘합리적(rational)’이라고 가정하고, 자신의 금지 구역을 유지하면서 협상 구역을 양도하거나 유지할지를 판단한다. FCFS 원칙에 따라 ego 차량이 목표 구역에 먼저 도달할 수 있으면 양도가 이루어지고, 그렇지 않으면 ego 차량이 대기한다.
- **실행 단계**: 협상 결과에 따라 ego 차량은 가속·감속·차선 변환을 수행한다. 협상이 실패하거나 상대 차량이 양도를 거부하면, 기존 RSS와 동일한 보수적인 회피 전략을 적용한다.
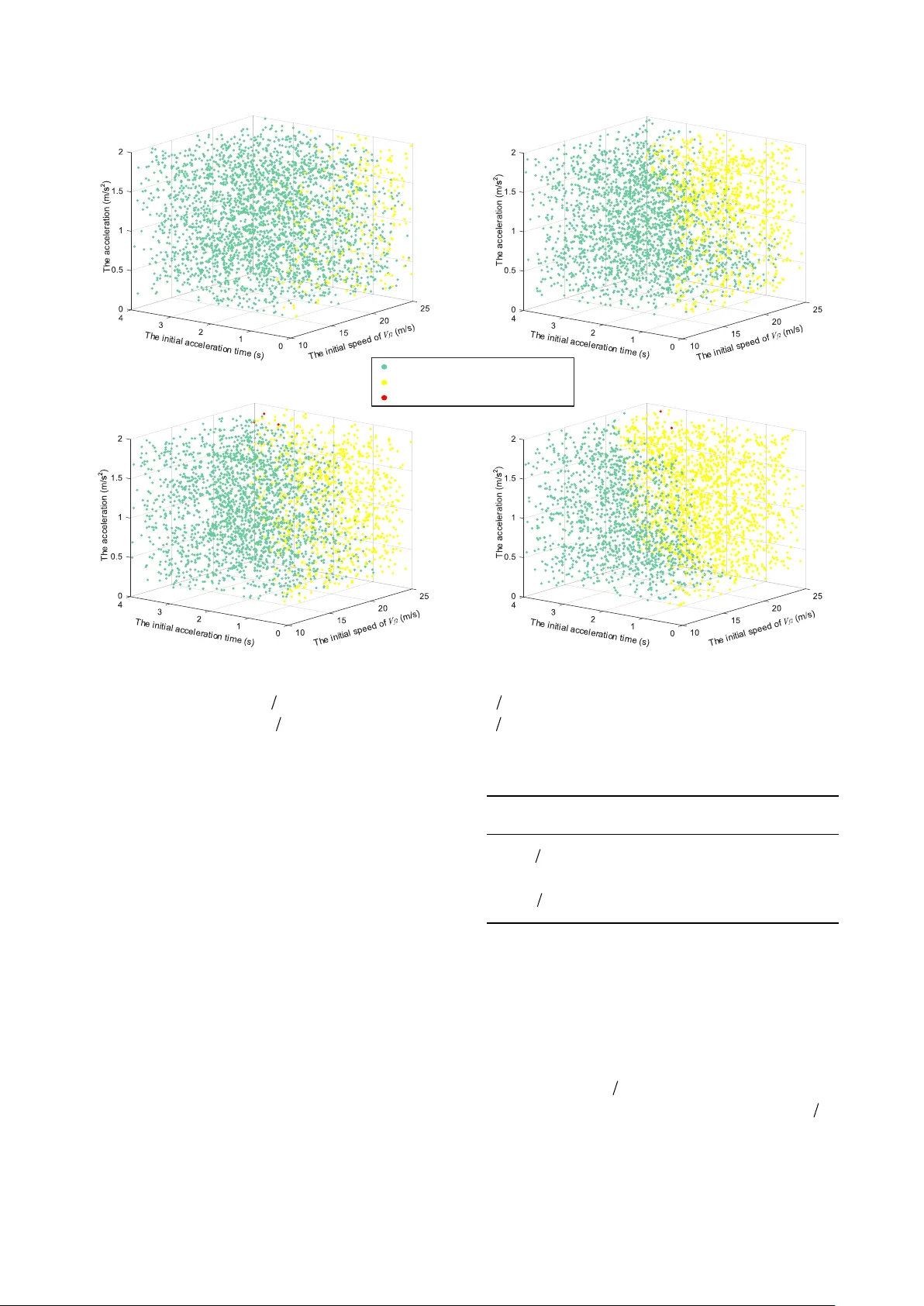
**4. 시뮬레이션 및 실험 결과**
- 동일한 교통 흐름, 차량 동역학, 센서 정확도 하에서 제안 전략과 기존 RSS를 비교하였다.
- 차선 변경 성공률은 RSS 대비 15~25% 상승했으며, 이는 협상 구역을 활용해 더 많은 차선 변경 기회를 포착했기 때문이다.
- 충돌 발생률은 거의 차이가 없거나 미미하게 감소하여, 안전성 손실이 없음을 확인하였다.
- 다중 차량이 동시에 협상에 참여하는 경우에도, 각 차량이 독립적인 1:1 협상을 수행하도록 설계했기 때문에 계산 복잡도가 크게 증가하지 않았다.
**5. 한계점 및 논의**
- **가정(A5, A6)**: ego 차량만이 병합 차량이며, 모든 차량이 합리적이라고 가정하였다. 실제 도로에서는 인간 운전자의 비합리적·공격적 행동이 존재한다.
- 5절에서는 이러한 가정이 깨지는 상황을 시뮬레이션으로 검증하고, 협상 실패 시 fallback 메커니즘을 RSS 기반 보수 전략으로 전환함으로써 안전성을 보장한다.
- **통신 제약**: V2V 통신이 불가능하거나 신호가 손실되는 경우, 암시적 의사소통(깜빡이, 가속·감속)으로 대체할 수 있음을 제시했으며, 향후 연구에서는 이러한 암시적 신호 인식 모델을 통합할 계획이다.
**6. 결론 및 향후 연구**
본 논문은 ‘우선권’이라는 전통적인 교통 규칙을 정량화하고, 이를 협상 메커니즘에 통합함으로써 차선 변경 시 안전과 효율을 동시에 달성하는 새로운 전략을 제시한다. 시뮬레이션 결과는 제안 전략이 기존 RSS 대비 차선 변경 성공률을 크게 향상시키면서도 안전성을 유지함을 보여준다. 향후 V2X 인프라가 보편화되고 인간‑자동차 상호작용 모델이 정교화되면, 제안된 협상 프레임워크는 교차로, 병합 구간 등 보다 복잡한 교통 상황에도 확장 가능할 것으로 기대된다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기