촉각 연결이 만든 최적의 공동 의사결정과 숨은 자신감 공유
이 연구는 두 사람(다이아드)이 촉각 장치를 통해 물리적으로 연결될 때, 시각적 판단 과제에서 개별 최고 성능자를 능가하는 정확도를 보이며, 언어적 협의보다 5배 빠르게 합의를 도출한다는 것을 입증한다. 계산 모델은 리더가 움직임의 시점과 힘을 조절해 자신의 자신감을 암묵적으로 전달하고, 파트너가 이를 받아들여 가중 평균을 수행한다는 메커니즘을 제시한다. 결과는 센서모터(촉각) 커뮤니케이션이 빠르고 효율적인 집단 의사결정 수단이 될 수 있음을 …
저자: Giovanni Pezzulo, Lucas Roche, Ludovic Saint-Bauzel
본 연구는 ‘암묵적 센서모터 커뮤니케이션, 특히 촉각 연결이 집단 의사결정의 최적화에 기여할 수 있는가’라는 가설을 검증하기 위해 설계되었다. 실험에 참여한 18쌍(총 36명)의 피험자는 동일한 시각적 자극을 두 화면에 동시에 보면서, 각각 독립적으로 어느 이미지에 이상치(oddball)가 포함됐는지를 판단한다. 개인 판단 단계에서는 각자가 개별적인 haptic 장치를 이용해 커서를 좌·우 목표 위치로 이동시켜 선택을 표시한다. 이때 두 장치는 물리적으로 연결되지 않아 어떠한 힘이나 움직임 정보를 교환할 수 없었다.
두 피험자의 선택이 일치하면 바로 실험이 종료되지만, 선택이 다르면 ‘합의 단계’가 시작된다. 합의 단계에서는 두 장치가 물리적으로 결합되어 하나의 공동 커서를 제어하게 된다. 피험자들은 각자 자신의 손잡이를 움직이며 힘을 가하고, 커서는 두 사람의 입력을 평균해 이동한다. 화면에는 공동 커서의 궤적만이 보이며, 각자는 상대방이 가하는 힘을 촉각적으로 감지한다.
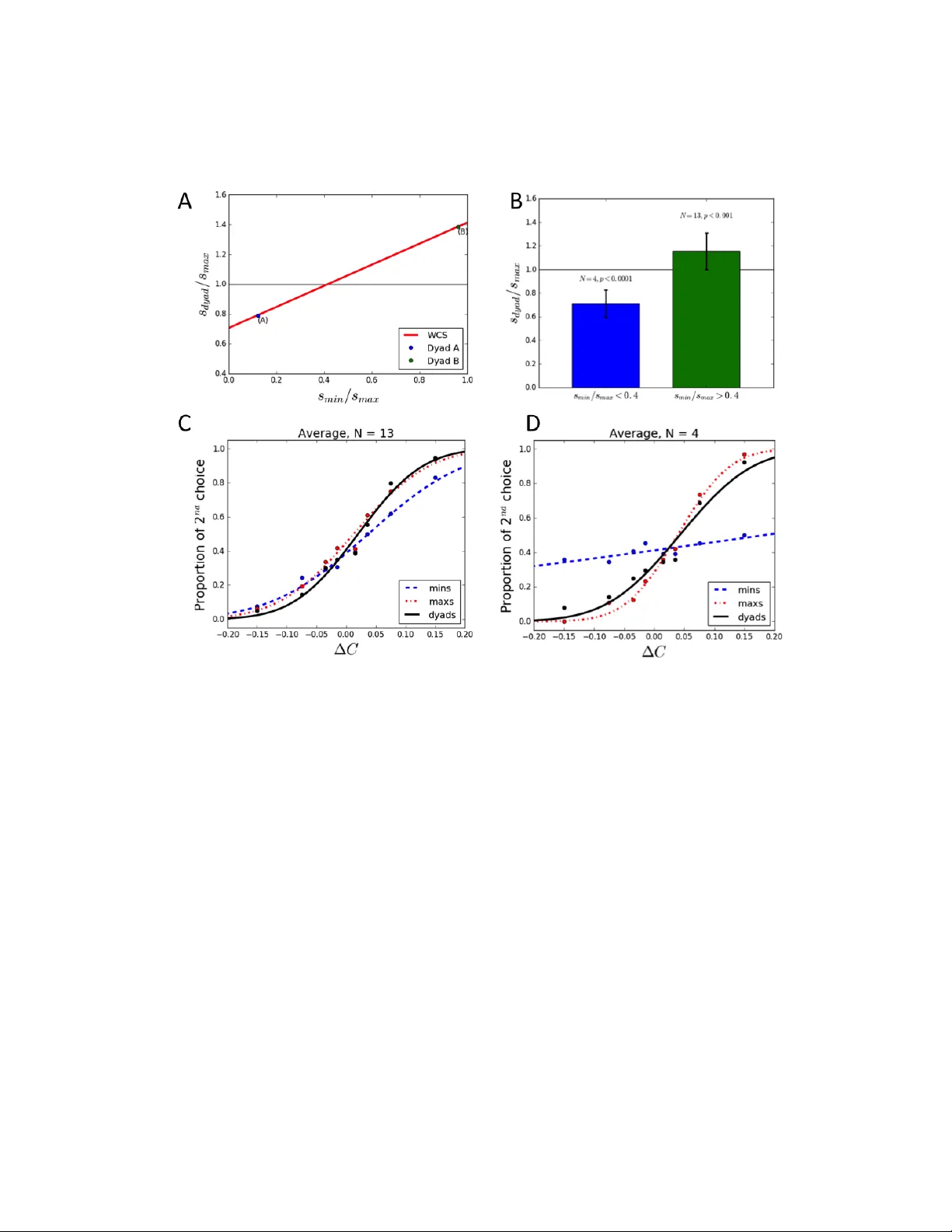
연구진은 먼저 ‘가중 자신감 공유(WCS) 모델’을 적용해 집단 선택을 예측했다. WCS 모델은 각 개인의 감각 민감도(sensitivity)를 추정하고, 이를 기반으로 신뢰도(자신감)를 가중치로 사용해 두 선택을 평균한다. 모델에 따르면, 두 사람의 민감도 비율(s_min/s_max)이 0.4 이상이면 집단이 개별 최고 성능자를 능가하고, 0.4 이하이면 오히려 성능이 떨어진다. 실험 결과는 이 예측과 일치했다. 유사 민감도(비율 > 0.4) 다이아드(13쌍)에서는 집단 정확도가 개별 최고 성능자를 유의하게 초과했으며(t(13)=3.94, p<0.001), 이질 민감도(비율 < 0.4) 다이아드(5쌍)에서는 집단 정확도가 오히려 낮았다(t(4)=-9.89, p<0.0001). 또한, 집단의 심리곡선 기울기가 WCS 모델이 예측한 값과 차이가 없었다(t(17)=0.51, p=0.62), 즉 촉각 기반 집단 의사결정이 Bayesian 최적 통합 원리를 따름을 확인했다.
시간 측면에서 촉각 다이아드의 평균 합의 시간은 2,856 ms(표준편차 2,022 ms)였으며, 이는 기존 언어 기반 연구(평균 13,860 ms)보다 약 5배 빠른 속도다. 이는 촉각 신호가 즉각적으로 전달되고, 언어적 교환 과정이 생략되기 때문으로 해석된다.
다음으로 연구진은 ‘리더십과 자신감 공유 메커니즘’을 밝히기 위해 다양한 운동·힘학적 지표를 분석했다. 첫 번째 지표는 ‘첫 번째 교차(First Crossing, 1C)’로, 시작점 주변 작은 구역(X₀ ± X_thresh)을 최초로 벗어난 방향을 기록한다. X_thresh를 0.05(전체 거리의 5 %)로 설정했을 때, 1C가 가리키는 방향은 전체 집단 선택을 88.5 % 정확도로 예측했다. 이는 ‘누가 먼저 움직였는가’가 곧 리더가 되고, 리더의 선택이 최종 합의에 크게 영향을 미친다는 강력한 증거다.
또한, 힘학적 변수인 피크 힘과 기계적 작업량(Work)도 분석했다. 리더는 평균 피크 힘이 0.75 N(팔로워 0.43 N)이며, 작업량은 0.30 J(팔로워 -0.08 J)로 유의하게 높았다(t(676)=9.71, p<0.0001; t(676)=15.7, p<0.0001). 이는 리더가 더 큰 힘을 가해 자신의 선택에 대한 확신을 물리적으로 전달하고, 팔로워는 이를 감지해 따라가는 구조임을 시사한다.
속도 분석에서는 리더와 전체 집단 평균 속도 비율(VeloL/VeloD)이 1.0788로, 팔로워와 전체 평균 속도 비율(VeloF/VeloD)이 1.1115보다 더 1에 가까웠다(N=1,866, p=0.00348). 이는 리더가 초기 움직임에서 전체 집단의 움직임을 주도하고, 팔로워가 그 속도에 맞춰 조정한다는 것을 의미한다.
통제 분석에서는 ‘단순히 먼저 움직인 사람을 따르는’ 것이 아니라, 실제 협상 과정이 존재함을 확인했다. 집단 시작 시간은 개별 시작 시간보다 현저히 길었으며(t(850, 4,352)=-23.84, p<0.0001), 이는 파트너 간에 힘과 속도를 조정하며 정보를 교환하는 시간이 필요함을 보여준다. 특히, 유사 민감도 다이아드에서는 시작 시간이 더 길었지만 정확도가 높았으며, 이는 충분한 협상이 더 나은 선택을 만든다는 점을 뒷받침한다.
논의에서는 촉각 채널이 언어보다 풍부하지는 않지만, 빠른 전송 속도와 낮은 인지 부하 덕분에 ‘자신감 공유’를 효율적으로 수행할 수 있음을 강조한다. 특히, 선택 옵션이 명확히 정의된 단순 과제에서는 촉각 기반 암묵적 커뮤니케이션이 언어 기반 명시적 커뮤니케이션과 동등한 정확도를 유지하면서도 훨씬 빠른 합의를 가능하게 한다. 이는 팀 스포츠, 로봇 협업, 실시간 의사결정 지원 시스템 등에서 활용될 수 있다.
마지막으로, 연구는 기존 의사소통 이론이 ‘명시적(언어·시각) 채널이 필수’라는 가정을 확장해, 센서모터(촉각) 교환도 최적의 집단 의사결정에 필수적인 정보(자신감)를 전달할 수 있음을 제시한다. 향후 연구에서는 다른 감각 채널(청각, 진동)이나 복합 멀티모달 인터페이스를 탐색해, 다양한 상황에서 최적의 협상 전략을 설계할 수 있을 것이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기