네트워크 제어 에너지 감소를 위한 비정규성 기반 중심성 측정
본 논문은 그래미안 기반 중심성 p와 q를 결합해 네트워크의 비정규성을 정량화하고, 이를 최대화하는 드라이버 노드 선택 전략을 제시한다. 비정규성이 큰 노드를 선택하면 평균 제어 에너지와 최악 경우 에너지 모두를 효과적으로 감소시킬 수 있음을 이론적 경계와 실험을 통해 입증한다.
저자: Gustav Lindmark, Claudio Altafini
본 논문은 복잡계 네트워크의 제어 입력 배치를 최적화하기 위해, 그래미안 기반 중심성 측정과 네트워크 비정규성 개념을 결합한 새로운 프레임워크를 제시한다. 서론에서는 구조적 제어가능성(Structural Controllability)과 제어 에너지(Controllability Gramian) 사이의 차이를 강조하며, 기존 연구들이 평균 에너지와 최악 경우 에너지를 동시에 최소화하는 데 한계가 있음을 지적한다.
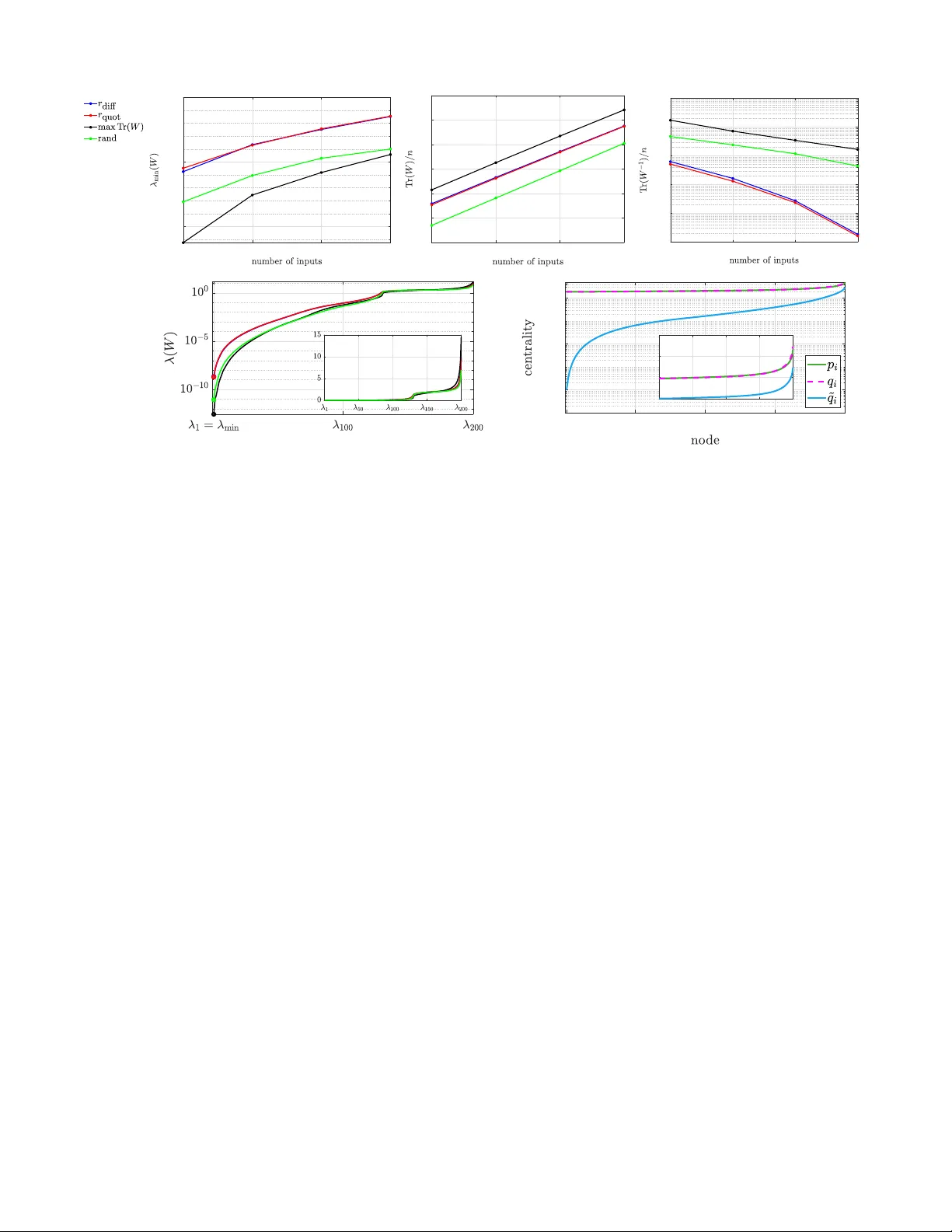
II절에서는 기본 기호와 연속시간 선형 시스템 \(\dot{x}=Ax+BK u\) 를 정의하고, controllability Gramian \(W(t_f)=\int_0^{t_f} e^{At}BK B^T K e^{A^T t} dt\) 를 소개한다. 안정한 A에 대해 무한시간 Gramian \(W\) 가 정의되며, 제어 에너지 지표로는 최소 고유값 \(\lambda_{\min}(W)\), trace\( (W^{-1})\), trace\( (W)\) 등을 사용한다.
III절에서 핵심 중심성 개념을 도입한다. ‘walk energy’ \(\varepsilon_{i\to j} = \int_0^{\infty} (e^{At})_{ji}^2 dt\) 를 정의하고, 이를 기반으로 두 가지 중심성을 정의한다. 첫 번째는 node‑to‑network 중심성 \(p_i = \mathrm{tr}(W^{(i)}) = \sum_j \varepsilon_{i\to j}\) 로, 노드 i가 전체 네트워크에 주입하는 총 H₂ 에너지를 나타낸다. 두 번째는 network‑to‑node 중심성 \(q_j = \mathrm{tr}(M^{(j)}) = \sum_i \varepsilon_{i\to j}\) 로, 모든 노드가 동시에 입력될 때 노드 j에 도달하는 총 에너지를 의미한다. 여기서 \(M^{(j)}\) 는 observability Gramian이다.
III‑B절에서는 이 두 중심성을 이용해 제어 에너지에 대한 하·상한을 유도한다. Lemma III.1은 개별 대각 원소 \(W_{jj}\) 가 드라이버 여부에 따라 \(q_j\) 혹은 \(\tilde q_j\) (자기 루프 제외) 로 제한됨을 보인다. Theorem III.2는 \(\lambda_{\min}(W) \le \min\{q_i, \tilde q_j\}\) 를 증명하고, Corollary III.2.1은 m개의 드라이버 노드에 대해 \(\lambda_{\min}(W) \le \min\{q_i, \tilde q_{(m+1)}\}\) 라는 구체적 상한을 제공한다. Theorem III.3은 trace\( (W^{-1}) \ge \sum_{j\in K} 1/q_j + \sum_{j\notin K} 1/\tilde q_j\) 라는 하한을 제시한다. 이는 드라이버 노드가 아닌 노드들의 \(\tilde q\) 가 작을수록 전체 제어 에너지 비용이 크게 증가함을 의미한다.
IV절에서는 비정규성(non‑normality)과 balanced realization 개념을 연결한다. 정의 IV.1에 따라 시스템이 balanced 하면 controllability와 observability Gramian이 동일하다. 완전 작동·관측 네트워크(B=C=I)에서 이 조건은 바로 인접 행렬 A 가 정상(normal)일 때와 동치임을 Theorem IV.1이 증명한다. 따라서 A가 비정규이면 \(N = M - W = \int_0^\infty
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기