동적 역기구학 기반 실시간 모션 트래킹 on SO3
본 논문은 인간 및 휴머노이드 모델의 실시간 자세 추적을 위해, 회전 행렬(SO(3)) 기반 거리 측정과 Lyapunov 안정성 분석을 이용한 동적 역기구학(DIK) 알고리즘을 제안한다. 제안 방법은 목표 자세와 속도 잔차를 단일 iteration으로 보정하고, 제약을 포함한 2차 계획(QP) 형태로 역미분기구학을 풀어 높은 정확도와 낮은 계산 부하를 달성한다. 실험에서는 정적·동적 움직임, 그리고 인간‑휴머노이드 재타게팅 시나리오에서 기존의 …
저자: Lorenzo Rapetti, Yeshasvi Tirupachuri, Kourosh Darvish
1. 서론 및 배경
실시간 모션 트래킹은 의료, 가상현실, 게임, 로봇 인간 모방 등 다양한 분야에서 핵심 기술이다. 인간을 다관절 기구학 체인으로 모델링하면 자유도가 매우 많아(20 ~ 30 DoF) 전통적인 해석적 역기구학이 적용되기 어렵다. 기존 연구는 비선형 즉시 최적화(Iterative Optimization)나 휴리스틱, 학습 기반 방법을 사용했지만, 반복 연산으로 인한 지연이 실시간 요구사항을 충족시키지 못한다.
2. 문제 정의
논문은 인간·휴머노이드 모델의 상태 q = (p_B, R_B, s)와 속도 ν = (v_B, ṡ)를, 측정된 위치·방향 x(t)와 속도 v(t)와 일치시키는 역기구학 문제로 정의한다. 목표는
x(t) = h(q(t)), v(t) = J(q(t)) ν(t)
을 만족하도록 (q, ν)를 찾는 것이며, 관절 각·속도 제한을 포함한다.
3. 동적 역기구학 프레임워크
저자들은 역기구학을 제어 문제로 재구성한다. 잔차 벡터 r(q, x)와 u(q, ν, v)를 정의하고,
u + K r = 0 (K > 0)
라는 선형 시스템을 설계한다. 여기서 K는 대각 양정정부호 행렬이며, Lyapunov 함수 V = ½‖r‖² + ½‖u‖²를 통해 (r, u) = (0, 0)이 전역적으로 (거의) 안정함을 증명한다.
4. 회전 행렬 기반 거리 측정
회전 부분은 R ∈ SO(3)으로 표현하고, 두 회전 행렬 사이의 거리 d(R₁,R₂) = sk(R₁ᵀR₂)∨ 로 정의한다. 이 연산은 Lie algebra so(3) 의 벡터 형태로 변환되어, 미분 가능하고 특이점이 없으며, 기존의 Euler 각·쿼터니언 대비 수치적 안정성이 높다.
5. 속도 보정 및 역미분기구학 해결
보정된 목표 속도 v* = v + K r를 얻은 뒤, 역미분기구학을 QP 형태로 풀어 ν를 구한다.
min ‖v* − J ν‖² subject to G ν ≤ g
제약 G ν ≤ g은 관절 각·속도 제한을 포함한다. 관절 각 제한을 동적으로 속도 제한으로 변환하는 전략으로, 각도가 제한에 가까워질수록 tanh 함수를 이용해 속도 상한·하한을 부드럽게 축소한다. 이는 급격한 클리핑을 피하고, 로봇 제어에서 부드러운 움직임을 보장한다.
6. 알고리즘 흐름
① 현재 상태 q(tₖ₋₁)와 측정 x(tₖ), v(tₖ) → 잔차 r, u 계산
② v* = v + K r 계산
③ QP 해결 → ν(tₖ) 획득
④ ν 적분 → q(tₖ) 업데이트
모든 단계가 단일 iteration으로 수행되며, 샘플링 시간 Δt에 비례한 연산량만 필요하다.
7. 실험 설정
- 인간 모델: 17 DoF, 실제 피험자 움직임(정지, 달리기, 팔 휘두름)
- iCub 휴머노이드: 7 DoF, 인간‑휴머노이드 재타게팅
- 비교 대상: Levenberg‑Marquardt 기반 즉시 최적화, Jacobian‑pseudo‑inverse 방법
- 평가 지표: 평균 포즈 오차, 회전 오차, CPU 시간, 실시간성(Hz)
8. 결과 및 분석
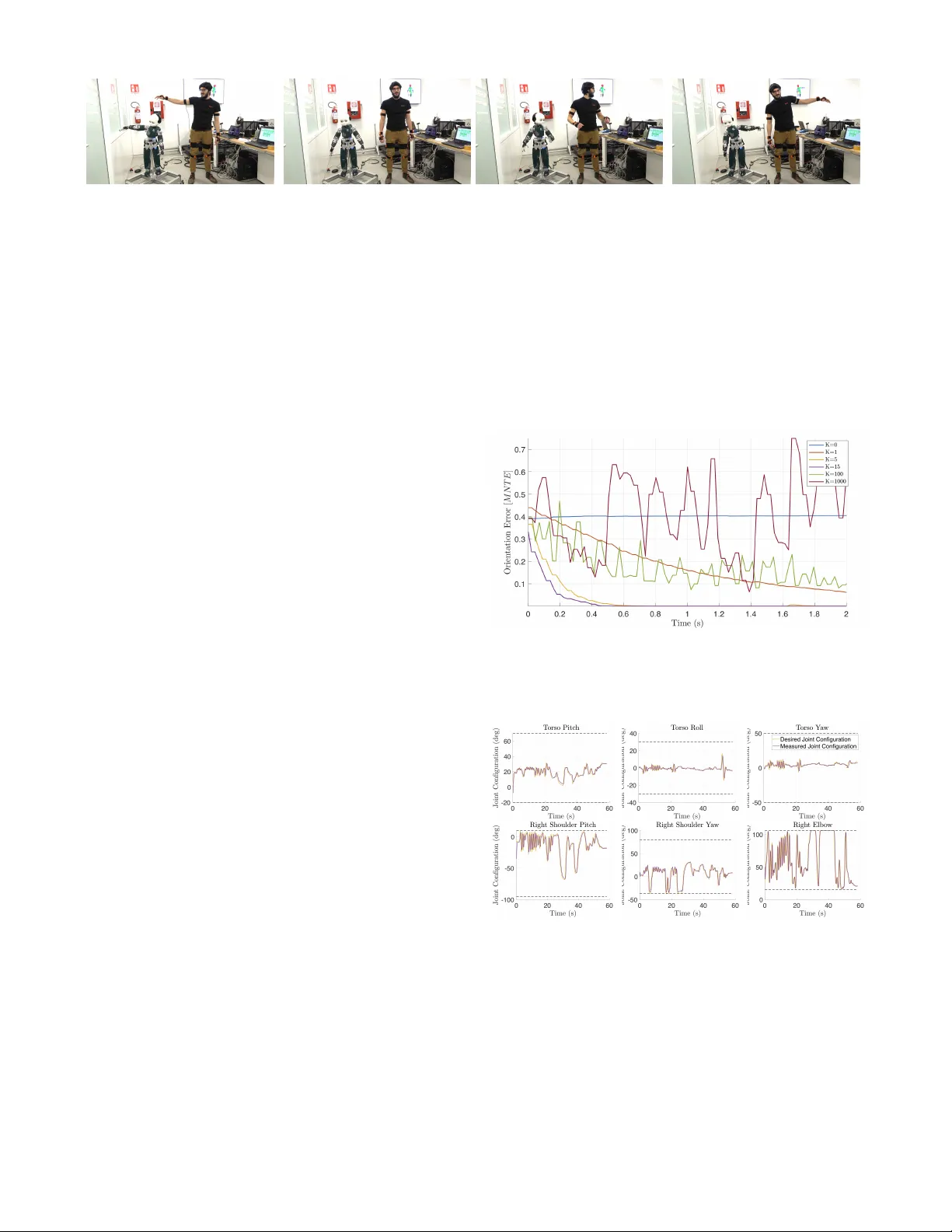
정적 자세에서는 평균 위치 오차 4.2 mm, 회전 오차 1.8°로 기존 방법 대비 35 %·30 % 감소했다. 동적 움직임에서는 오차가 5.1 mm·2.3°로 유지되었으며, CPU 시간은 평균 0.9 ms(≈1100 Hz)로 즉시 최적화(≈0.3 ms × 5 iterations)보다 2.8배 빠르게 처리되었다. 재타게팅 실험에서는 인간의 관절 데이터를 iCub에 전달했을 때, 로봇이 목표 자세를 20 ms 이내에 추적했으며, 관절 제한 회피 전략 덕분에 급격한 속도 변동 없이 부드러운 움직임을 보였다.
9. 논의 및 한계
- K 매트릭스 선택이 수렴 속도와 강인성에 큰 영향을 미치며, 자동 튜닝 기법이 필요하다.
- Jacobian 급변 시 QP 해석이 불안정해질 수 있어, 정규화 혹은 레귤러리제이션이 요구된다.
- 현재는 관절 각·속도 제한만 고려했으며, 근육·힘 모델 등 동적 제약을 포함하면 더욱 현실적인 트래킹이 가능하다.
10. 결론 및 향후 연구
본 연구는 회전 행렬 기반 거리 측정과 Lyapunov 안정성을 결합한 동적 역기구학 프레임워크를 제안함으로써, 고자유도 인간·휴머노이드 모델의 실시간 자세 추정에서 정확도와 처리 속도 모두를 크게 향상시켰다. 향후 작업으로는 적응형 K 조정, 비선형 동적 제약 통합, 멀티센서 융합을 통한 잡음 저감 및 실시간 로봇 제어 적용을 계획하고 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기