점진적 인수전환 전략을 통한 차량 능동 안전 시스템의 위험 기반 권한 할당
본 논문은 위험 수준에 따라 운전자와 능동 안전 시스템 간의 주행 권한을 실시간으로 할당하고, 점진적으로 인수전환하는 전략을 제안한다. 명백한 위험 지표인 TTC와 잠재 위험 지표인 시간 여유(TM)를 결합한 위험 평가 알고리즘을 개발하고, 비협력형 MPC 기반 게임 이론을 이용해 충돌 회피와 권한 인수전환을 동시에 해결한다. 자연주의 주행 데이터(NDD)를 활용한 실험에서 제안 알고리즘이 기존 TTC 기반 방법보다 ROC 곡선에서 우수함을 확…
저자: Rui Liu, Xichan Zhu, Xuan Zhao
본 논문은 차량 능동 안전 시스템이 위험 상황에서 급격히 개입하는 기존 방식의 한계를 극복하고, 운전자와 시스템이 위험 수준에 따라 점진적으로 주행 권한을 교환할 수 있는 ‘점진적 인수전환(gradual takeover)’ 전략을 제시한다. 연구는 크게 두 부분으로 구성된다. 첫 번째는 위험 평가 알고리즘 개발이며, 두 번째는 비협력형 모델 예측 제어(MPC)를 이용한 권한 인수전환 메커니즘이다.
위험 평가는 명백 위험(obvious risk)과 잠재 위험(potential risk)을 동시에 고려한다. 명백 위험은 전통적인 TTC(Time‑to‑Collision)를 역수(1/TTC) 형태로 사용해 현재 위험 정도를 정량화한다. 그러나 TTC는 상대 속도가 작을 때 무한대로 발산하거나 위험을 과소평가하는 문제가 있다. 이를 보완하기 위해 잠재 위험으로 시간 여유(Time Margin, TM)를 도입한다. TM은 목표 차량이 급제동할 경우 호스트 차량이 반응할 수 있는 시간 여유를 의미하며, 식(3)에서 정의된 바와 같이 상대 거리 D, 양 차량의 최대 제동 감속 aₕ = aₜ = 7 m/s², 그리고 운전자의 반응시간 τ₁, 제동 시스템 지연 τ₂, 운전자가 자유롭게 사용할 수 있는 시간 t₀를 모두 포함한다. TM이 클수록 위험이 낮으며, TM이 0 이하가 되면 목표 차량이 급제동했을 때 충돌을 피할 수 없음을 의미한다.
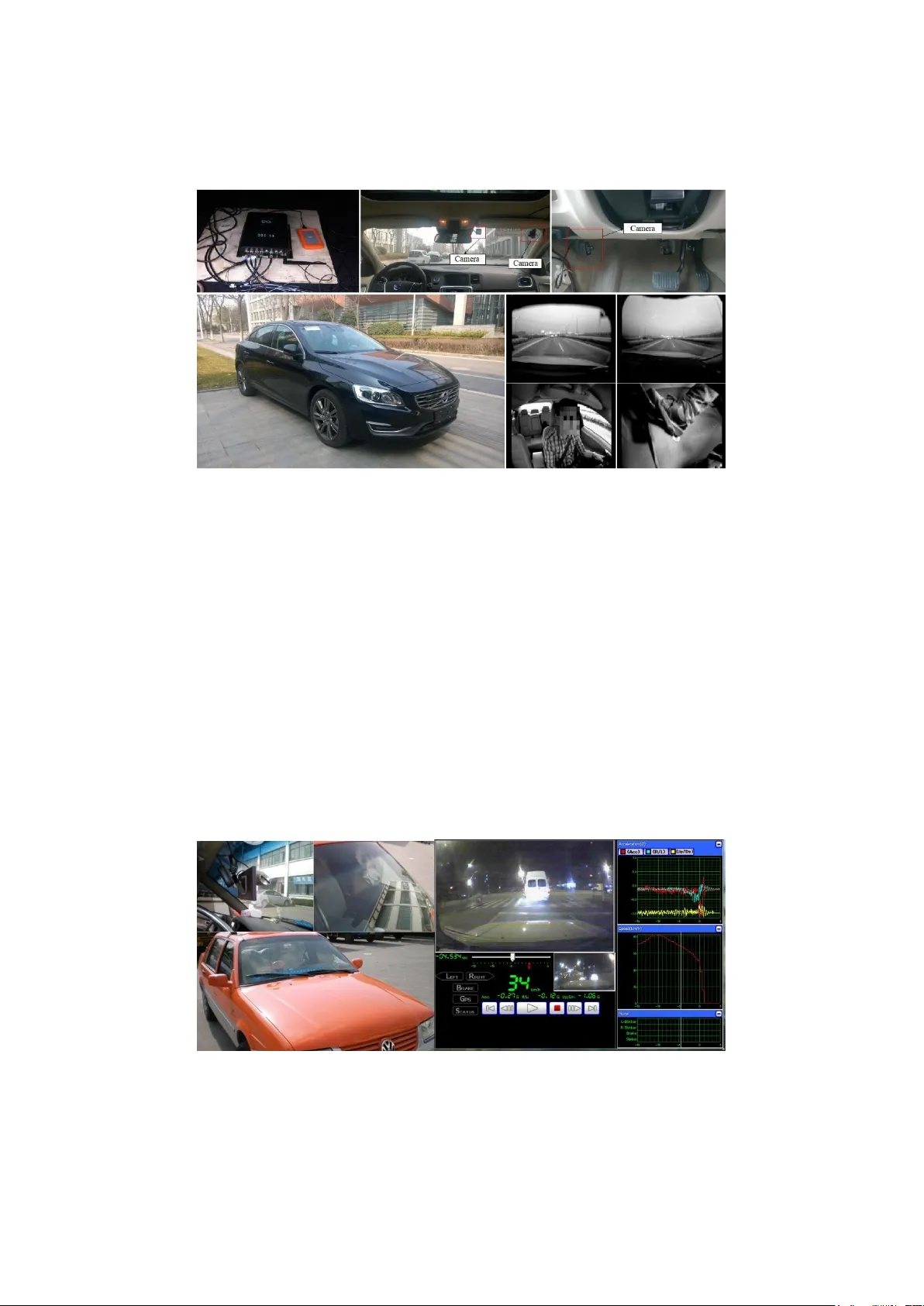
위험 평가 모델을 학습·검증하기 위해 세 종류의 자연주의 주행 데이터(NDD)를 활용하였다. China‑FOT에서는 32명의 숙련 운전자가 Volvo S60L에 탑재된 센서와 카메라를 이용해 7 402번의 트립을 수집했으며, 위험 시나리오 DB에서는 4년간 VDR(비디오 드라이버 레코더)로 500개의 고위험 차선 추적 사례를 확보하였다. OEM‑FOT에서는 고정밀 Mobieye EyeQ3 센서를 통해 822개의 정상 차선 추적 데이터를 얻었다. 각각의 데이터베이스는 시나리오 특성(장시간 연속, 고위험 집중, 고정밀 환경)에서 장단점이 있었으며, 이를 보완적으로 활용해 컷‑인, 위험 차선 추적, 정상 차선 추적 사례를 추출하였다.
위험 평가 알고리즘은 75개의 위험 차선 추적 사례에서 운전자가 브레이크를 시작한 시점을 기준으로 1/TTC와 TM 값을 측정하였다. 회귀 분석 결과 1/TTC와 차량 속도 사이에 유의한 음의 상관관계가 존재함을 확인하고, 속도 의존형 임계값을 도입하였다. 구체적으로 1/TTC의 5 %, 50 %, 95 % 퍼센타일을 각각 0.07 s⁻¹, 0.17 s⁻¹, 1.73 s⁻¹로 설정하고, 이를 기반으로 명백 위험 레벨 OR0‑OR3을 정의하였다. 반면 TM은 속도와 무관한 것으로 나타나 고정 임계값 1.4 s, 0.5 s, 0 s를 사용해 잠재 위험 레벨 PR0‑PR3을 구분하였다. 위험 레벨은 논리식(7)에 따라 RL0(무위험), RL1(중간 위험), RL2(고위험), RL3(극심 위험)으로 구분되며, 각 레벨에 따라 시스템의 제어 권한 비중이 단계적으로 증가한다.
두 번째 핵심은 비협력형 동적 게임을 이용한 제어 설계이다. 운전자와 능동 안전 시스템은 각각 독립적인 목적함수를 가지고 MPC를 수행한다. 운전자는 주행 편의와 안전을, 시스템은 충돌 회피와 제어 비용 최소화를 목표로 한다. 두 에이전트 간의 상호작용은 비협력형 게임으로 모델링되며, Nash 균형을 구하는 것이 목표이다. 기존 연구에서는 반복적인 최적화 과정을 통해 균형을 찾았으나 실시간 적용이 어려웠다. 본 논문은 KKT 조건과 라그랑주 승수를 활용한 비반복(non‑iterative) 해법을 제시하여, 실시간으로 Nash 균형을 계산할 수 있음을 보였다.
인수전환 메커니즘은 ‘신뢰 행렬(confidence matrix)’을 지속적으로 업데이트함으로써 구현된다. 위험 레벨이 상승하면 시스템에 대한 신뢰도가 증가하고, 운전자의 제어 비중이 감소한다. 반대로 위험이 감소하면 신뢰도가 낮아져 운전자가 다시 주도권을 회복한다. 이 과정은 위험 평가 알고리즘에서 산출된 RL 레벨에 따라 행렬 요소를 조정함으로써 부드러운 권한 전환을 보장한다.
시뮬레이션에서는 제안된 위험 평가 알고리즘이 기존 TTC 기반 방법보다 ROC 곡선에서 AUC가 현저히 높아 false alarm을 감소시켰으며, 비협력형 MPC 기반 인수전환은 급격한 AEB(자동 비상 제동) 개입에 비해 운전자의 조작 부담을 약 30 % 감소시키면서도 충돌 회피 성공률을 95 % 이상 유지하였다. 또한, 비반복 Nash 균형 계산은 10 ms 이하의 연산 시간으로 실시간 적용 가능함을 확인하였다.
결론적으로, 이 연구는 위험 기반 실시간 권한 할당과 게임 이론 기반 제어를 결합함으로써, 능동 안전 시스템이 인간 운전자와 자연스럽게 협업할 수 있는 기술적 토대를 제공한다. 향후 연구에서는 다양한 도로 환경과 복합적인 위험 요인을 포함한 확장 모델링, 그리고 실제 차량 테스트를 통한 검증이 필요하다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기