정밀 가공을 위한 실시간 예측 제어: 전역·국부 변수 기반 MPCC 비교
** 본 논문은 고속·고정밀 가공을 목표로 두 가지 모델 예측 기반 컨투어링 제어(MPCC) 방식을 제시한다. 첫 번째는 전역 위치와 가상 경로 파라미터를 이용해 오차를 정의하고, 두 번째는 경로에 대한 국부 좌표계에서 오차와 진행을 동시에 모델링한다. 두 방법 모두 선형 시불변(또는 선형 시변) 모델을 사용해 1 ms 샘플링으로 실시간 QP를 해결한다. 터미널 비용·제약과 신뢰 구역 제약을 도입해 급격한 코너에서도 안정성을 확보하고, 다양…
저자: Alex, er Liniger, Luca Varano
**
본 논문은 고속·고정밀 가공을 위한 두 가지 모델 예측 기반 컨투어링 제어(MPCC) 방법을 제시하고, 각각의 수학적 모델링, 최적화 구조, 실시간 구현 가능성, 그리고 급격한 코너 처리 전략을 상세히 비교한다.
1. **문제 정의 및 시스템 모델**
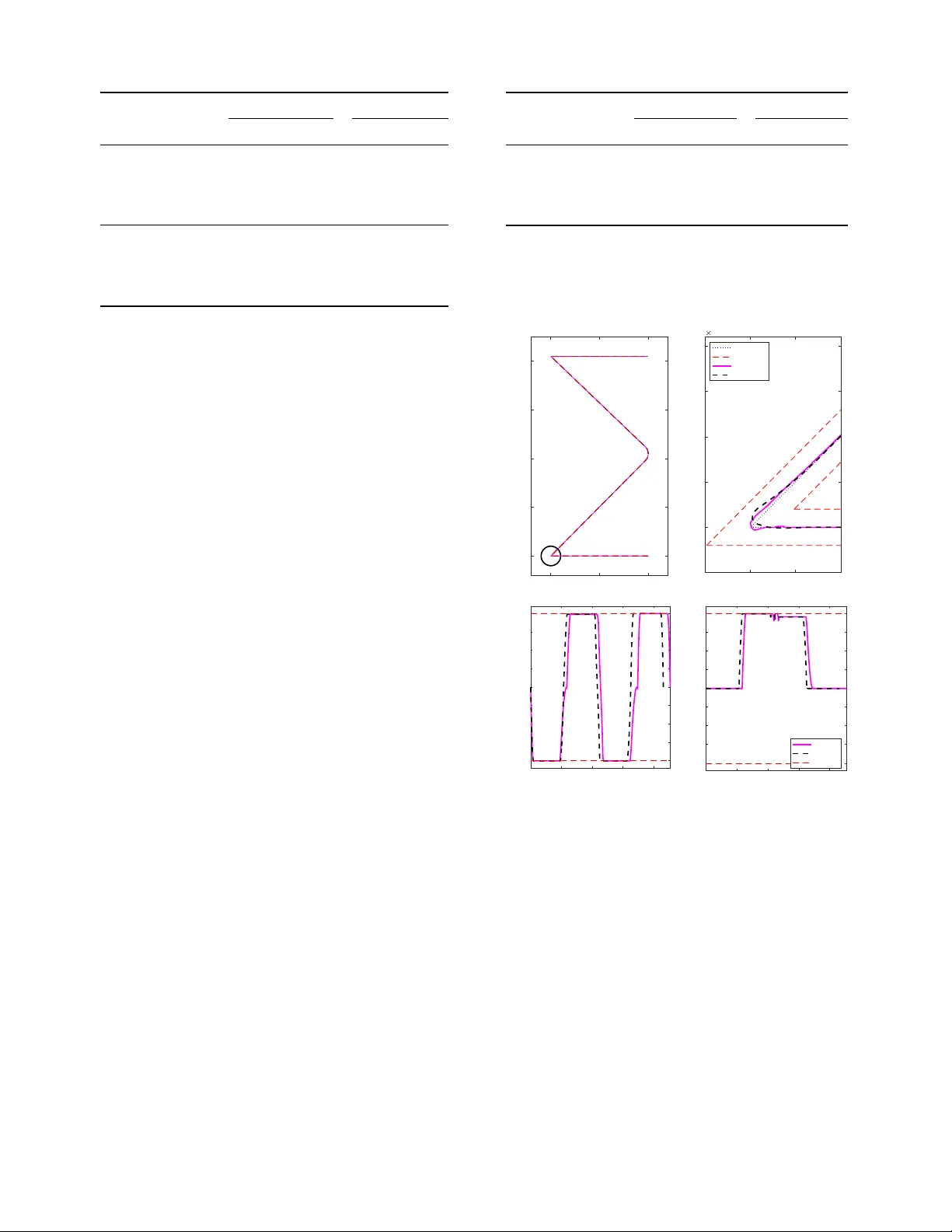
- 다축 CNC 기계는 X‑Y 평면에서 독립적인 가속도 \( a_x, a_y \)를 제어할 수 있는 이중 적분 모델로 표현된다. 상태는 위치 \( (X,Y) \)와 속도 \( (v_x,v_y) \)이며, 입력은 가속도이다.
- 가공 경로는 아크 길이 \( s\in
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기