장애물 회피를 위한 힐버트 곡선 변형 로봇 경로 계획
본 논문은 로봇이 사전 정보 없이 탐색 영역을 이동할 때, 힐버트 공간채우기 곡선(Hilbert Curve)을 이용해 최대 두 개의 인접한 격자 셀(장애물)을 실시간으로 회피하는 알고리즘을 제시한다. 곡선의 프랙탈 구조와 방향 변환(Grammar)을 활용해 차단된 노드를 우회하는 웨이포인트 배열 변형 전략을 설계하고, 수학적 정리를 통해 모든 비차단 노드가 반드시 방문됨을 증명한다. 시뮬레이션 및 실제 로봇 실험을 통해 전략의 유효성을 확인하였…
저자: Anant A. Joshi, Maulik C. Bhatt, Arpita Sinha
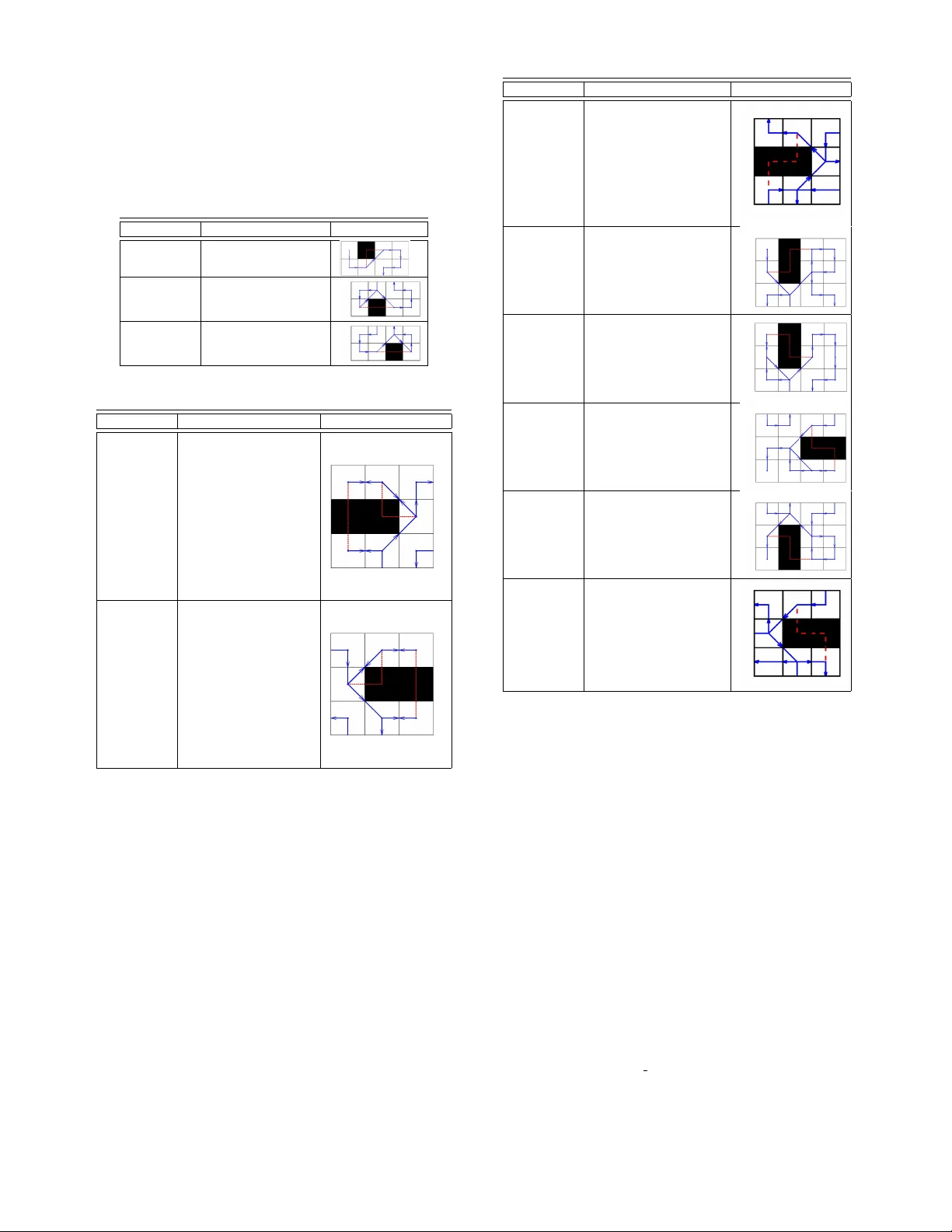
본 논문은 로봇이 사전 지식 없이 2차원 영역을 탐색할 때, 힐버트 공간채우기 곡선(Hilbert Curve, HC)을 경로 생성 도구로 사용하면서 발생할 수 있는 장애물(‘hole’)을 실시간으로 회피하는 방법을 제시한다. 먼저 HC의 수학적 정의와 프랙탈 특성을 소개한다. HC는 단위 구간
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기