Lie 그룹 기반 제약 EKF로 3개의 IMU만으로 하체 자세 추정
본 논문은 특수 유클리드군 SE(3) 표현과 제약 확장 칼만 필터(CEKF)를 결합해, 골반·양쪽 대퇴·정강이의 3차원 위치·방향을 3개의 착용형 IMU(천골·양쪽 발목)만으로 실시간 추정한다. 예측‑측정‑제약 3단계 순환 구조와 제로‑속도 업데이트, 골반 높이 가정, 공변량 제한자를 도입해 드리프트를 억제하고, 고정된 대퇴 길이·힌지형 무릎·볼‑소켓형 골반 관절 제약을 적용한다. 9명의 건강한 피험자 실험에서 sagittal plane 무릎…
저자: Luke Sy, Nigel H. Lovell, Stephen J. Redmond
본 논문은 착용형 관성 측정 장치(IMU)의 수를 최소화하면서도 하체의 자세와 관절 각도를 정확히 추정하기 위한 새로운 알고리즘을 제시한다. 기존의 광학 모션 캡처 시스템은 높은 정확도를 제공하지만 실험실 환경에 국한되고, 상용 IMU 기반 시스템은 각 신체 부위마다 센서를 부착해야 하는 번거로움과 비용 문제를 안고 있다. 이러한 문제를 해결하고자 저자들은 3개의 IMU(천골, 좌·우 정강이)만을 사용해 골반·양쪽 대퇴·정강이의 3차원 위치와 방향을 동시에 추정하는 ‘LGKF‑3IMU’ 알고리즘을 개발하였다.
알고리즘의 핵심은 특수 유클리드군(SE(3))을 상태 공간으로 채택하고, 이를 기반으로 제약 확장 칼만 필터(CEKF)를 적용하는 것이다. SE(3) 표현은 회전과 병진을 하나의 행렬로 결합해, 회전 특이점(예: 짐벌 락) 없이 전역 좌표계에서의 절대 위치와 방향을 동시에 다룰 수 있다. 상태 변수 X_k는 골반과 양쪽 정강이의 위치·방향·속도를 포함하며, 각 세그먼트는 4×4 동차 변환 행렬로 표현된다.
알고리즘은 크게 세 단계로 구성된다.
1) **예측 단계**: 각 IMU에서 측정된 가속도를 세계 좌표계로 변환한 뒤, 이중 적분을 통해 위치와 속도를 전진한다. 여기서는 각 세그먼트의 방향을 외부 자세 추정 알고리즘(예: Madgwick, Mahony)으로부터 얻은 값으로 보정한다. 프로세스 노이즈는 가속도와 방향 측정의 분산을 반영해 공분산 행렬 P를 업데이트한다. Lie 알제브라적 Jacobian F_k와 선형화 행렬 C_k를 사용해 비선형 동역학을 정확히 전파한다.
2) **측정 단계**: 네 가지 측정 모델을 적용한다. (a) **방향 측정**: 각 세그먼트의 절대 방향을 직접 관측값과 비교해 보정한다. (b) **골반 높이 가정**: 골반의 Z축 위치를 초기 서 있는 높이 z_p에 가깝게 유지한다. (c) **제로‑속도 업데이트(ZUPT) 및 평면 가정**: 발이 지면에 접촉할 때 발목의 3차원 속도를 0으로 강제하고, 발목의 Z축 위치를 바닥 높이 z_f에 고정한다. (d) **공변량 제한자**: 전역 위치 추정이 무한히 발산하지 않도록 현재 상태를 가상의 측정값으로 사용해 공분산을 제한한다. 각 측정은 Lie 그룹 로그와 지수 맵을 통해 오차 ν_k를 계산하고, 칼만 이득 K_k를 통해 상태를 업데이트한다.
3) **제약 단계**: 인간 생체역학적 제약을 강제로 적용한다. (a) **대퇴 길이 고정**: 추정된 대퇴 벡터의 길이가 사전에 측정된 대퇴 길이 d_lt, d_rt와 일치하도록 강제한다. (b) **힌지형 무릎 관절**: 무릎을 1 DOF 힌지 관절로 모델링해, 무릎 각도가 비현실적인 값으로 벗어나지 않도록 제한한다. (c) **관절 가동 범위(ROM) 제한**: 무릎 각도가 인간의 정상적인 ROM(예: 0°~130°)을 초과하지 않도록 투영한다. 이 제약은 상태와 공분산을 동시에 고려해 최적 투영을 수행한다.
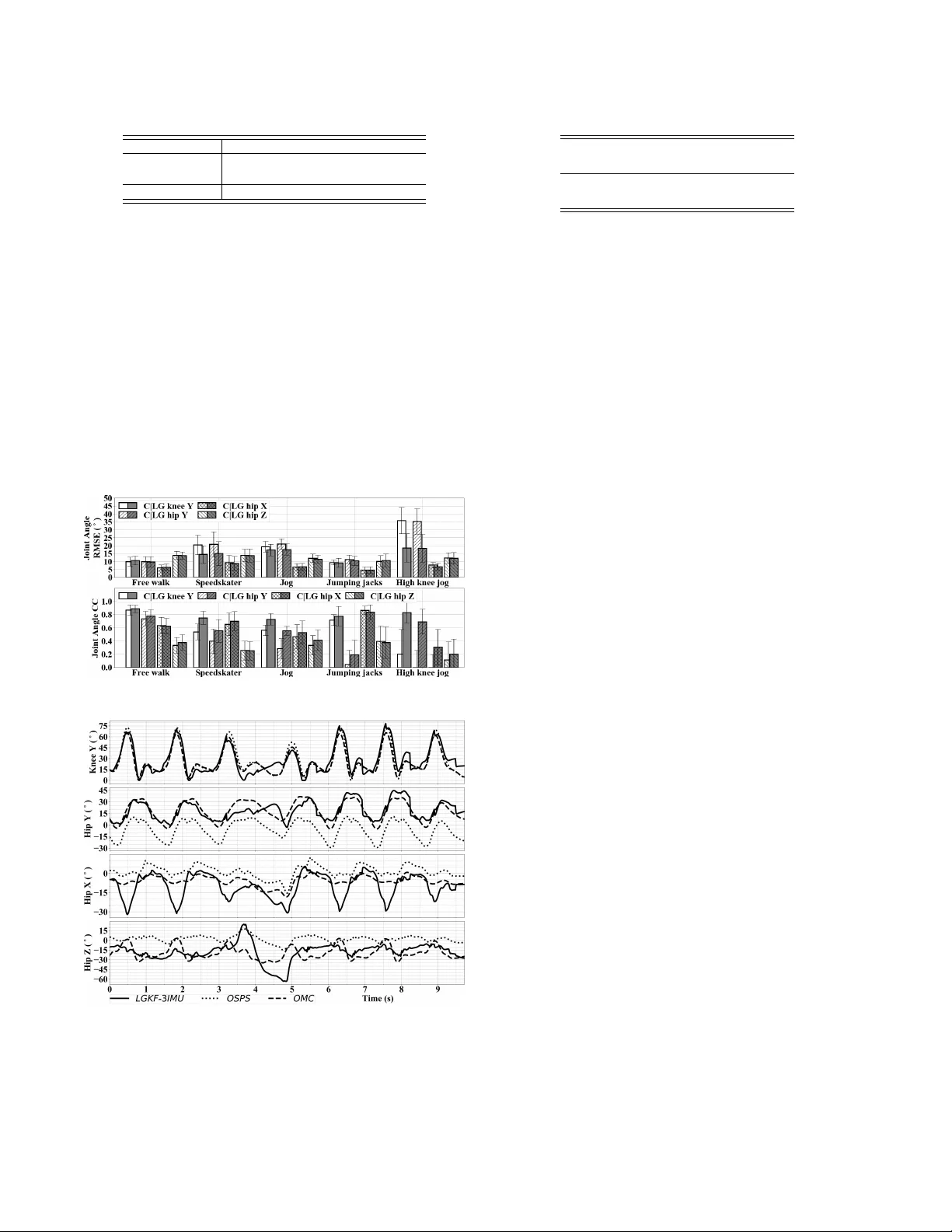
실험은 9명의 건강한 피험자를 대상으로 4 × 4 m² 실내 공간에서 자유 보행을 수행하게 하여 데이터를 수집했다. 골반·대퇴·정강이의 실제 관절 각도는 광학 마커 기반 시스템으로 측정했으며, 이를 기준으로 LGKF‑3IMU의 추정값을 평가했다. 결과는 sagittal plane에서 무릎 각도 RMSE가 10.5 ± 2.8°, 골반 각도 RMSE가 9.7 ± 3.3°였으며, 상관계수는 각각 0.89 ± 0.06, 0.78 ± 0.09였다. 이는 기존 6~7개의 IMU를 사용한 시스템과 비교해 비슷하거나 약간 낮은 수준이지만, 센서 수를 절반 이하로 줄인 점에서 큰 장점을 가진다.
논문의 주요 공헌은 다음과 같다.
- **Lie 그룹 기반 상태 표현**을 통해 위치·방향을 동시에 다루며, 회전 특이점 없이 전역 좌표계에서의 추정을 가능하게 함.
- **제약 EKF**를 적용해 생체역학적 제약을 직접 상태에 반영함으로써, 센서 수가 적어도 관절 이탈이나 비현실적 각도 발생을 억제.
- **제로‑속도 업데이트와 골반 높이 가정**을 활용해 이중 적분에 의한 드리프트를 효과적으로 보정.
- **공변량 제한자**를 도입해 전역 위치 추정의 공분산이 무한히 커지는 현상을 방지, 실시간 안정성을 확보.
한계점으로는 (1) 발 착지 감지 정확도에 크게 의존한다는 점, (2) 골반‑발목 간의 추가 관측(예: 압력 센서, 마그네틱) 부재로 인해 여전히 드리프트가 존재한다는 점, (3) 현재는 sagittal plane 각도만 평가했으며, 전방·후방·횡방향 움직임에 대한 일반화 검증이 필요하다는 점을 들 수 있다. 또한, 실험이 실내 정적인 환경에서만 진행돼, 외부 방해(예: 전자기 간섭, 울퉁불퉁한 지면) 상황에서의 성능은 아직 확인되지 않았다.
향후 연구 방향은 (a) 발목‑골반 사이에 추가적인 저비용 센서(압력, 초음파 거리) 도입으로 관측 정보를 보강, (b) 다관절 3D 관절 각도 추정으로 확장, (c) 실시간 임상 적용을 위한 알고리즘 경량화와 모바일 디바이스 구현, (d) 다양한 보행 패턴(달리기, 계단 오르내리기) 및 병리학적 보행(파킨슨, 중풍)에서의 검증을 포함한다. 이러한 발전이 이루어지면, 저비용·고편의성의 IMU 기반 보행 분석 시스템이 일상 생활에서의 장기 모니터링 및 재활 치료에 널리 활용될 수 있을 것으로 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기