비가우시안 잡음과 이상치에 강인한 전력계통 동적 상태 추정기
** 본 논문은 PMU 기반 전력계통에서 관측 노이즈가 장‑꼬리 분포를 보이는 현실을 고려하여, 관측·혁신 이상치를 억제하고 비가우시안 잡음을 효과적으로 필터링하는 새로운 강인형 일반화 최대우도 Unscented Kalman Filter(GM‑UKF)를 제안한다. 배치‑모드 회귀와 통계적 선형화(Unscented Transform과 동등함)를 기반으로 Huber 손실을 최소화하는 GM‑추정기를 구성하고, Projection Statistic…
저자: Junbo Zhao, Lamine Mili
**
본 논문은 전력계통 동적 상태 추정(DSE) 분야에서 기존 필터들이 직면한 두 가지 근본적인 한계를 극복하고자 한다. 첫 번째는 PMU 기반 측정값이 가우시안이 아닌 장‑꼬리 분포를 보이는 비가우시안 잡음이며, 두 번째는 관측, 혁신, 구조적 이상치가 동시에 발생할 수 있다는 점이다. 이러한 문제를 해결하기 위해 저자들은 ‘Generalized Maximum‑likelihood‑type Unscented Kalman Filter(GM‑UKF)’라는 새로운 필터 구조를 제안한다.
**1. 문제 정의와 기존 방법의 한계**
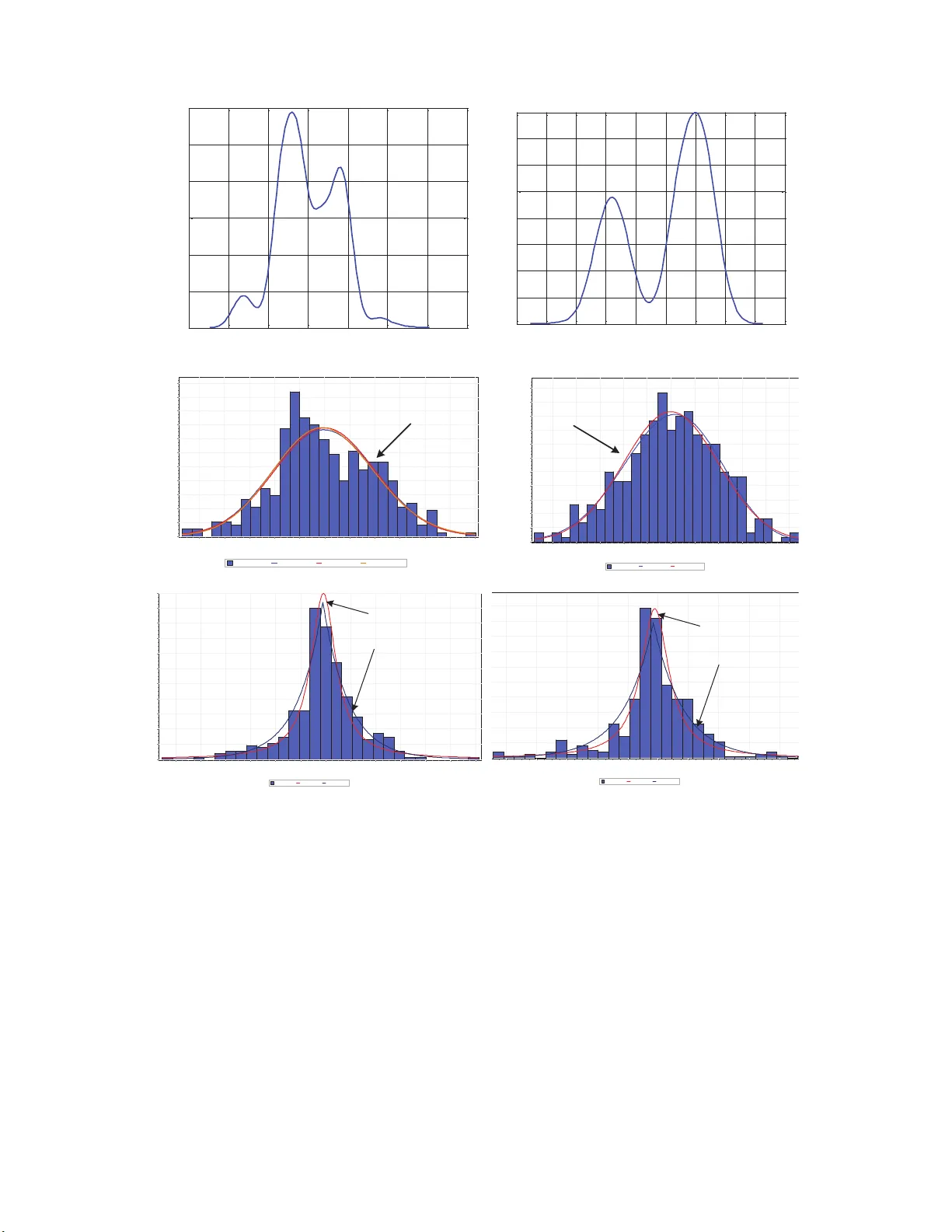
전통적인 DSE는 EKF, IEKF, UKF, Particle Filter(PF) 등을 사용한다. 그러나 이들 모두 (i) 가우시안 잡음 가정에 의존해 가중 최소제곱(WLS) 형태의 추정식을 사용하고, (ii) 이상치에 취약해 관측값이 크게 왜곡되면 추정이 급격히 악화된다. 특히, PMU 데이터를 분석한 결과 전압·전류 크기와 실·무효 전력은 이중 피크 혹은 라플라시안·코시안과 같은 두꺼운 꼬리 분포를 보이며, 이는 가우시안 기반 필터가 편향을 일으키는 직접적인 원인이다.
**2. GM‑UKF의 핵심 아이디어**
GM‑UKF는 크게 네 단계로 구성된다.
- **배치‑모드 회귀 형태**: 예측 단계와 관측 단계의 식을 동시에 고려해 과잉결정식 \( \mathbf{Y} = \mathbf{H}\mathbf{x} + \mathbf{e} \) 를 만든다. 여기서 \(\mathbf{Y}\)는 예측된 상태와 실제 관측값을 결합한 벡터, \(\mathbf{H}\)는 선형화된 변환 행렬, \(\mathbf{e}\)는 잔차이다. 이 형태는 혁신과 관측 이상치를 동시에 탐지할 수 있는 데이터 여유를 제공한다.
- **통계적 선형화와 Unscented Transform 동등성**: Theorem 1을 통해 2ⁿ개의 sigma‑point를 이용한 통계적 선형화가 기존 Unscented Transform과 동일한 평균·공분산을 산출함을 증명한다. 따라서 비가우시안 잡음 하에서도 sigma‑point를 그대로 활용해 상태와 관측의 1차·2차 통계량을 정확히 근사할 수 있다.
- **강인 GM‑추정기**: 손실 함수를 Huber 형태로 정의하고, 각 샘플에 대한 가중치를 Projection Statistics(PS)로부터 얻는다. PS는 예측 상태와 혁신 벡터를 2‑차원 행렬로 구성해 Mahalanobis 거리와 유사한 척도로 이상치를 판단한다. PS가 사전에 정의된 임계값을 초과하면 해당 샘플에 낮은 가중치를 부여하고, IRLS(Iteratively Reweighted Least Squares) 알고리즘을 통해 최적화한다. 이 과정은 관측 이상치와 혁신 이상치를 동시에 억제한다.
- **점근적 공분산 업데이트**: 전체 영향함수(total influence function)를 전개해 강인 추정기의 점근적 공분산 행렬을 도출한다. 이는 기존 UKF에서 단순히 프로세스·관측 잡음 공분산을 더하는 방식보다 더 정확한 불확실성 추정이 가능하게 한다.
**3. 알고리즘 흐름**
1) 초기 상태와 공분산을 설정하고 sigma‑point를 생성한다.
2) 예측 모델 \(f(\cdot)\)에 sigma‑point를 전달해 예측 상태와 공분산을 얻는다.
3) 관측 모델 \(h(\cdot)\)에 sigma‑point를 전달해 예측 관측값을 얻고, 배치‑모드 회귀식을 구성한다.
4) PS를 계산해 이상치 여부를 판단하고, Huber‑GM‑IRLS를 수행해 가중치를 재조정한다.
5) 가중치가 적용된 회귀식으로 상태를 업데이트하고, 전체 영향함수를 이용해 새로운 공분산을 계산한다.
6) 1‑5 과정을 실시간으로 반복한다.
**4. 이론적 기여와 기대 효과**
- **비가우시안 잡음에 대한 강인성**: 상태 추정값이 점근적으로 가우시안 분포를 따르게 함으로써 sigma‑point가 평균·공분산을 정확히 근사하도록 만든다.
- **이상치 억제**: PS 기반 가중치 조정과 Huber 손실 최소화가 관측·혁신 이상치를 동시에 억제한다.
- **계산 효율성**: Jacobian 계산이 필요 없으며, sigma‑point 수는 상태 차원에 비례(2n)만큼만 증가한다. IRLS는 수렴 속도가 빠르고 행렬 연산 중심이므로 실시간 적용 가능하다.
- **공분산 정확도**: 전체 영향함수를 이용한 공분산 추정은 비가우시안·비선형 환경에서도 신뢰할 수 있는 불확실성 정보를 제공한다.
**5. 한계와 향후 연구**
논문에서는 구조적 이상치(예: 위상 오류, 파라미터 급변) 탐지는 다루지 않았으며, 이는 별도의 모델 기반 진단 기법이 필요함을 언급한다. 또한, Part II에서 실제 PMU 데이터와 시뮬레이션을 통한 성능 검증이 제시될 예정이며, 향후 실전 전력계통에 적용하기 위한 하드웨어 구현 및 병렬화 방안도 연구될 필요가 있다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기