머리 방향 시스템의 기능과 구조가 재귀 신경망 최적화로 나타나다
연속적인 각속도 입력을 통합해 현재 머리 방향을 추정하도록 훈련된 재귀 신경망(RNN)이, 생물학적 머리 방향 회로에서 알려진 ‘컴퍼스’와 ‘시프터’ 두 종류의 뉴런을 자연스럽게 형성한다. 학습 후 네트워크의 연결 구조와 뉴런의 튜닝 특성이 설치류와 초파리의 실제 회로와 정량적으로 유사함을 보이며, 목표‑구동 최적화가 뇌 회로의 해부·기능적 조직을 재현할 수 있음을 시사한다.
저자: Christopher J. Cueva, Peter Y. Wang, Matthew Chin
본 연구는 목표‑구동 학습이 뇌 회로의 기능·구조를 재현할 수 있는지를 검증하기 위해, 머리 방향(HD) 시스템을 모델링 대상으로 삼았다. HD 시스템은 설치류와 초파리에서 광범위하게 연구된 회로로, ‘컴퍼스’라 불리는 방향 선택 뉴런과 ‘시프터’라 불리는 회전 정보를 전달하는 뉴런 두 종류가 존재한다. 연구진은 100개의 유닛으로 구성된 연속시간 재귀 신경망(RNN)을 설계하고, 초기 방향을 sin·cos 형태로, 매 시간 단계마다 각속도(AV)를 스칼라 입력으로 제공하였다. 네트워크는 헤드 방향을 sin·cos 형태의 두 개 출력 뉴런으로 복원하도록 평균제곱오차와 발화율 L2 정규화 항을 포함한 손실 함수를 최소화하도록 학습되었다. 최적화는 Hessian‑free 알고리즘과 Adam을 모두 사용해 검증하였다.
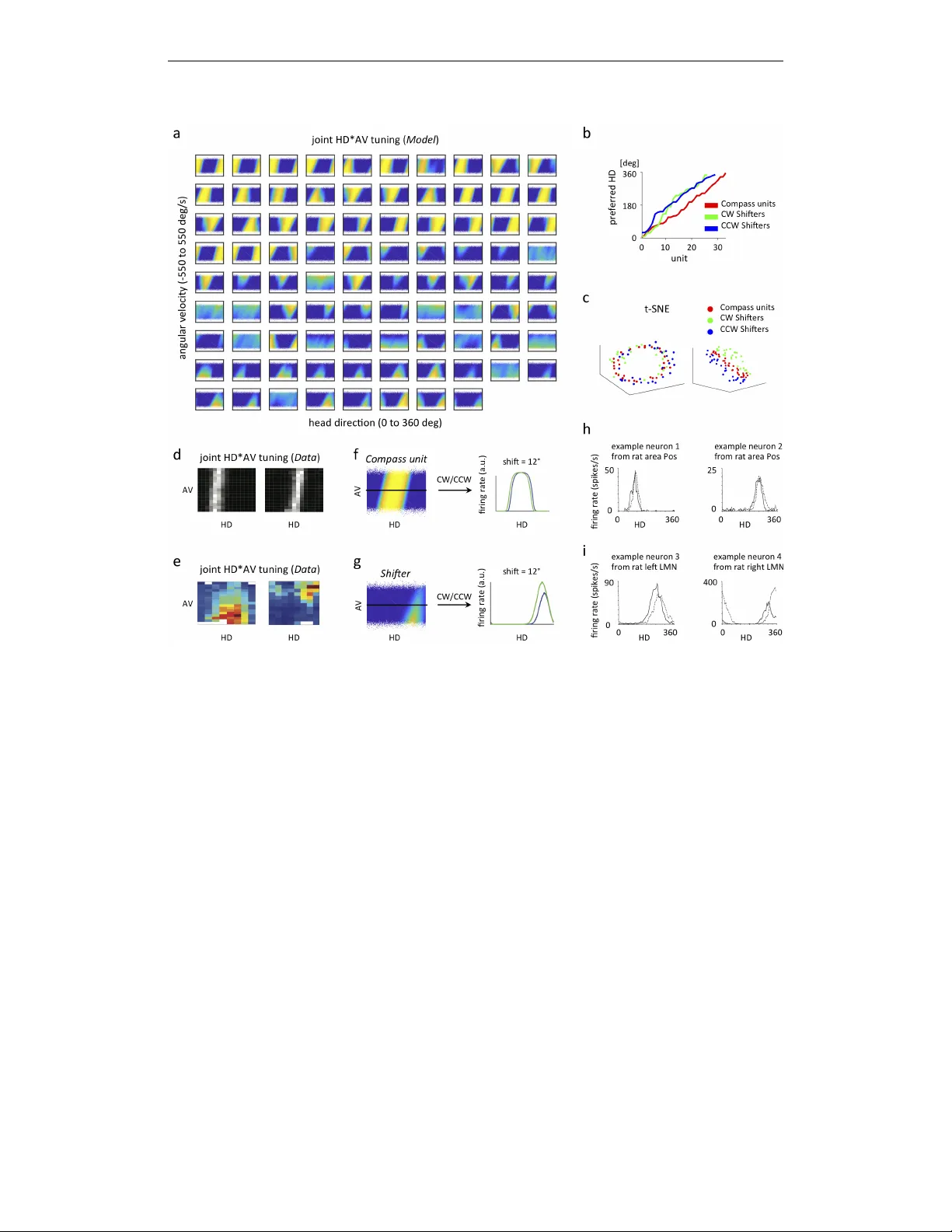
훈련이 진행됨에 따라 네트워크는 정확히 현재 머리 방향을 추정했으며, 각 유닛의 발화율을 HD와 AV 두 변수에 대해 2차원 튜닝 맵으로 시각화한 결과, 두 개의 뚜렷한 기능적 군집이 나타났다. 첫 번째 군집은 HD에만 강하게 반응하고 AV에 거의 민감하지 않은 ‘컴퍼스’ 유닛이며, 두 번째 군집은 HD와 AV 모두에 선택적으로 반응하는 ‘시프터’ 유닛이다. 시프터 유닛은 다시 시계방향(CW) 회전과 반시계방향(CCW) 회전에 따라 서로 다른 서브클래스로 구분되었으며, 각 서브클래스는 전체 0~360° 각도를 고르게 타일링했다. 이러한 기능적 구분은 설치류 전측방핵(ADN)과 초파리 중앙복합체(PB·EB)에서 보고된 신경 유형과 정량적으로 일치한다.
연결 구조 분석에서는 ‘컴퍼스’ 유닛 간에 강한 순환 연결이 존재하고, ‘시프터’ 유닛이 ‘컴퍼스’ 유닛에 비대칭적인 입력을 제공함을 확인했다. 특히, 시프터 유닛들의 연결 가중치는 자신이 선호하는 회전 방향에 따라 위상 차이를 갖는 형태로, 실제 초파리 PB에서 관찰되는 좌·우 대칭 연결 패턴을 모방한다. t‑SNE 임베딩을 통해 유닛 간 발화율 상관관계 기반 거리 행렬을 3차원으로 시각화했을 때, 컴퍼스와 시프터 군집이 명확히 구분되는 ‘컴퍼스 원형’ 구조가 드러났다.
또한, 네트워크의 HD 튜닝 곡선은 AV에 따라 미세하게 이동하고, 시프터 유닛은 AV에 대해 연속적인 그레이디드 응답을 보였다. 이러한 특성은 설치류와 초파리에서 보고된 실제 뉴런들의 튜닝 변화와 일치한다. 연구진은 이러한 결과가 네트워크가 각도 적분이라는 최적화 문제를 해결하기 위해 생물학적 회로가 채택한 구조적·기능적 원칙을 스스로 발견했음을 시사한다는 점을 강조한다.
논문의 의의는 사전 정의된 해부학적 제약 없이 무작위 연결로 시작한 인공 신경망이, 목표‑구동 학습만으로도 실제 뇌 회로와 유사한 토폴로지를 형성한다는 점이다. 이는 인공 신경망을 뇌 연구 모델로 활용하는 새로운 패러다임을 제시한다. 다만, 현재 모델은 1‑D 각도 통합에 국한되어 있으며, 시각·전정 등 외부 감각 입력이나 다중 모듈 간 상호작용을 포함한 복합적인 내비게이션 과제에 대한 일반화는 아직 검증되지 않았다. 향후 연구에서는 이러한 요소들을 추가하고, 학습 과정에서 나타나는 가중치 변화의 다이내믹스를 신경생물학적 시냅스 가소성과 연결짓는 작업이 필요할 것이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기