선형 시스템을 위한 고정 복잡도·저보수 적응형 강인 MPC
** 본 논문은 파라미터 불확실성과 외란이 존재하는 선형 시스템에 대해, 이동 윈도우 기반 집합‑멤버십 추정과 튜브 기반 강인 MPC를 결합한 적응형 모델 예측 제어 방식을 제안한다. 파라미터 집합을 고정된 초평면(하이퍼큐브) 형태로 유지함으로써 온라인 연산량을 사전에 지정된 수준으로 제한하고, 최소 평균제곱(LMS) 점 추정으로 비용 함수를 구성해 유한 이득 ℒ₂ 안정성을 보장한다. 이론적 제약 만족·안정성 증명과 함께, 보수성·복잡도 간…
저자: Johannes K"ohler, Elisa Andina, Raffaele Soloperto
**
본 논문은 파라미터 불확실성과 외란이 존재하는 선형 시스템에 대해, 보수성을 최소화하면서도 실시간 구현이 가능한 강인 적응형 모델 예측 제어(MPC) 프레임워크를 제안한다. 연구 배경으로는 기존 강인 MPC가 파라미터 불확실성을 고정된 보수적인 집합으로 다루어 성능 저하를 초래하고, 반면 적응형 MPC는 파라미터 추정을 통해 보수성을 낮추지만 연산 복잡도가 급격히 증가한다는 점을 지적한다. 이를 해결하기 위해 저자는 다음과 같은 두 가지 핵심 기법을 결합한다.
1. **이동 윈도우 기반 집합‑멤버십 추정**
- 시스템 모델은 xₜ₊₁ = A_θ xₜ + B_θ uₜ + dₜ 형태이며, 파라미터 θ ∈ ℝᵖ 는 시간에 따라 변하지 않는 상수이다.
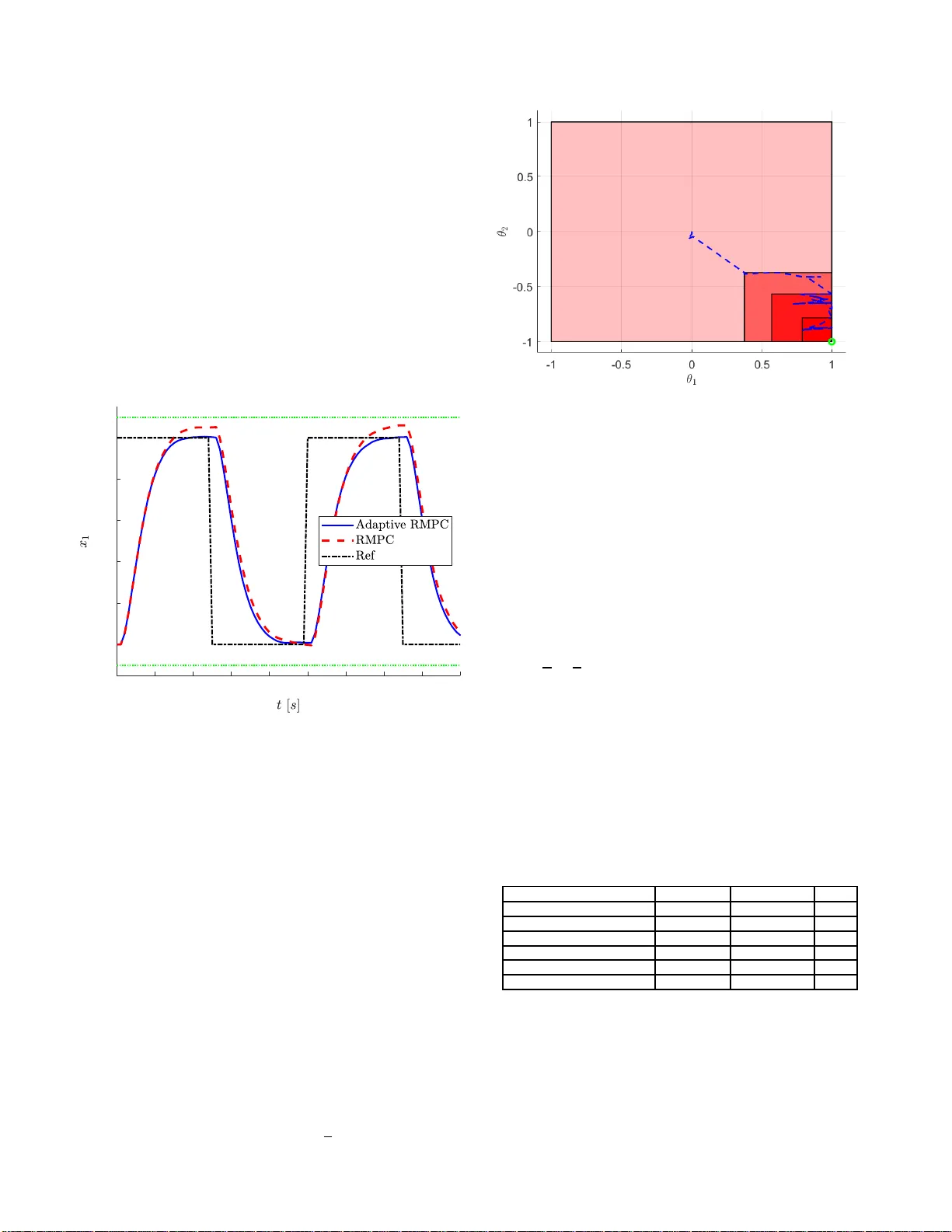
- 초기 파라미터 집합 Θ_HC₀ 는 중심 θ₀ 와 반경 η₀ 를 갖는 하이퍼큐브(단위 무한대 노름)로 정의한다.
- 매 시간 단계마다 과거 M 개의 측정 데이터 {Δ_{t‑k}} 를 이용해 선형 프로그램(LP)을 풀어 각 파라미터 차원의 최소·최대 값을 구한다. 이를 통해 새로운 중심 θₜ 와 반경 ηₜ 를 계산하고, 이전 집합과의 포함 관계 Θ_HCₜ ⊆ Θ_HC_{t‑1} 을 유지한다.
- 하이퍼큐브 형태를 고정함으로써 연산량은 2p 개의 작은 LP에 국한되며, 복잡도가 시간에 따라 증가하지 않는다. 이는 전통적인 폴리토프 기반 필터(예: 교차점 필터)와 대비되는 장점이다.
2. **튜브 기반 강인 MPC**
- 사전 설계된 피드백 K 와 양의 정부호 P 를 이용해 폐루프 행렬 A_cl,θ = A_θ + B_θK 가 모든 파라미터 집합 Θ_HC₀ 에 대해 이차 안정성을 만족하도록 LMI 기반 설계한다.
- 튜브는 고정된 폴리토프 P = { x | H_i x ≤ 1, i=1…r } 를 사용하며, 예측 단계마다 이 폴리토프를 평행 이동·스케일링하여 실제 상태 궤적을 포함한다.
- 파라미터 변동에 따른 수축률 ρ_θ 는 LP ρ_θ = max_i max_{x∈P} H_i A_cl,θ x 로 사전 계산하고, 파라미터 변화 Δθ ∈ η B_p 에 대해 ρ_{θ+Δθ} ≤ ρ_θ + η L_B (식 (8)) 로 상한을 구한다. 여기서 L_B 는 또 다른 LP를 통해 얻는다.
- 외란 집합 D 에 대해서는 상수 d = max_i max_{d∈D} H_i d 를 사전 계산한다.
**점 추정 및 비용 함수**
- LMS(Least Mean Squares) 점 추정 \hatθₜ 은 \hatθ_{t‑1} 에 예측 오차 \tildex₁|_{t‑1} 와 입력 D(x_{t‑1},u_{t‑1}) 를 곱한 항을 더하고, 파라미터 집합 Θ_HCₜ 에 투영한다.
- 비용 함수는 ℓ(x,u) = xᵀQx + uᵀRu (양의 정부호)와 함께, 예측 단계에서 \hatθₜ 를 이용해 예측 상태 \hatx_{k|t} 를 계산하고, 실제 상태와의 차이를 최소화한다.
- Lemma 2는 이 점 추정이 ℒ₂ 안정성을 보장함을 증명한다(즉, 상태와 외란의 제곱합이 초기 파라미터 오차와 외란 에너지에 의해 상한이 존재한다).
**이론적 보장**
- Lemma 1은 이동 윈도우 하이퍼큐브가 항상 실제 파라미터를 포함하고, 집합 크기가 비감소함을 보장한다.
- Proposition 1은 파라미터 변동이 튜브 수축률에 미치는 영향을 선형 상한 η L_B 로 제한한다.
- Theorem 1(논문 본문에 상세히 기술)에서는 제약 집합 Z 내에서 초기 상태가 주어졌을 때, 제안된 MPC 최적화 문제가 항상 해를 가지며, 제약 만족과 유한 이득 ℒ₂ 안정성을 동시에 만족한다는 것을 증명한다.
**복잡도·보수성 트레이드‑오프**
- 온라인 연산은 (i) 2p LP, (ii) |P|·N 개의 제약을 갖는 QP, (iii) 간단한 행렬 연산(LMS)으로 구성된다. 사용자는 p, M, N, |P| 값을 사전에 지정해 실시간 실행 시간을 예측할 수 있다.
- 보수성은 두 요소에 의해 결정된다. 첫째, 하이퍼큐브가 실제 파라미터 집합보다 넓어지는 경향이 있어 보수적일 수 있다. 둘째, 튜브 크기는 수축률 ρ_θ 와 외란 상수 d 에 의존하며, 파라미터 변동이 클수록 η L_B 가 커져 튜브가 팽창한다.
- 논문은 수치 예제(2차 시스템)에서 (a) 제안 방식이 기존
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기