다중 센서 분산 융합을 위한 효율적인 멀티베르누이 필터 알고리즘
본 논문은 각 센서 노드에서 멀티베르누이(MB) 필터를 사용해 다중 목표를 추적하고, 일반화 공분산 교차(GCI) 융합 규칙을 적용해 분산 융합을 수행한다. 기존 GCI‑MB 융합은 베르누리 구성요소 수에 따라 융합 가설이 지수적으로 증가해 계산량이 급증한다. 저자는 중요도가 낮은 가설을 제거하고, 베르누리 요소들을 GCI 발산 기반으로 클러스터링하여 독립적인 소규모 융합을 병렬로 수행하는 근사 방법을 제안한다. 이 방법은 메모리와 연산량을 크…
저자: Wei Yi, Suqi Li, Bailu Wang
본 논문은 다중 센서 네트워크에서 각 노드가 멀티베르누이(MB) 필터를 이용해 다중 목표를 추적하고, 이들 로컬 포스터리어를 일반화 공분산 교차(GCI) 규칙으로 융합하는 기존 방법의 계산 복잡도 문제를 해결하고자 한다. 기존 GCI‑MB 융합은 두 센서의 베르누리 구성요소를 일대일 매핑하는 모든 가능한 융합 지도(θ)를 고려해야 하며, 그 수는 베르누리 수에 대해 조합적으로 증가한다. 결과적으로 가설 수가 급격히 늘어나 메모리와 연산량이 실시간 적용을 방해한다.
논문은 먼저 GCI‑MB 융합의 수학적 구조를 상세히 복습한다. 로컬 MB 밀도는 존재 확률 r(i)와 상태 밀도 p_i(x)로 정의된 M개의 베르누리 구성요소의 집합이며, GCI 융합은 두 MB 밀도의 기하 평균을 취해 일반화 멀티베르누이(GMB) 밀도를 만든다. GMB는 모든 가능한 매핑 θ와 선택된 베르누리 집합 I에 대한 가중치 w(I,θ)와 융합된 단일 객체 밀도 p_{i,θ}(x)의 곱으로 표현된다. 이때 가중치와 단일 객체 밀도는 존재 확률과 상태 밀도의 가중 평균 형태를 띤다.
다음으로 저자는 GMB를 다시 MB 형태로 근사하는 과정에서 발생하는 계산량을 분석한다. GMB의 모든 가설을 전부 계산해야 하는데, 이는 베르누리 수가 늘어날수록 지수적으로 증가한다. 이를 해결하기 위해 두 가지 핵심 아이디어를 제시한다.
1. **중요도가 낮은 가설의 절삭 및 정규화**
가설의 가중치 w(I,θ)는 존재 확률과 상태 밀도의 곱으로 구성되며, 실제로 대부분의 가설은 매우 작은 가중치를 가진다. 저자는 사전 임계값 ε를 설정해 w(I,θ) < ε 인 가설을 모두 버리고, 남은 가설들의 가중치를 재정규화한다. 이렇게 하면 전체 가설 수가 크게 감소하면서도 L₁ 오차가 이론적으로 ε에 비례하는 상한을 갖는다.
2. **GCI 발산 기반 클러스터링**
절삭된 가설들을 모두 계산하지 않기 위해, 베르누리 구성요소들을 서로 독립적인 클러스터로 묶는다. 두 베르누리 i와 j 사이의 거리로 GCI 발산 D_KL(π_i‖π_j)을 사용한다. 발산이 작으면 두 베르누리가 동일 목표에 대한 후보일 가능성이 높아 하나의 클러스터에 포함하고, 발산이 크면 서로 독립적인 목표로 간주한다. 이 과정을 무방향 그래프의 연결 요소 탐색으로 구현한다. 각 베르누리를 정점으로, 발산이 임계값 τ 이하인 경우에만 간선을 추가한다. 연결 요소(클러스터)를 찾는 작업은 Union‑Find 자료구조를 이용해 O(N α(N)) 시간에 수행된다.
클러스터링이 완료되면, 각 클러스터 내부에서만 완전한 GCI‑MB 융합을 수행한다. 클러스터 간에는 독립성을 가정하므로, 전체 융합은 “클러스터 1의 융합 결과 × 클러스터 2의 융합 결과 × …” 형태의 곱으로 표현된다. 이는 원래 GMB의 구조와 동일하지만, 각 클러스터의 베르누리 수가 작아 가설 수가 급격히 감소한다. 또한, 클러스터별 융합은 서로 독립적이므로 병렬 처리에 최적화할 수 있다.
**가우시안 혼합(GM) 구현**
실제 시스템에서는 베르누리 상태 밀도를 가우시안 혼합 형태로 표현한다. 저자는 각 베르누리의 존재 확률 r과 가우시안 컴포넌트 집합 {w_k, μ_k, Σ_k}를 유지하고, 클러스터 내 GCI 융합 단계에서 다음과 같은 연산을 수행한다.
- 존재 확률은 가중 평균 r_i^ω · r_j^{1‑ω} 로 계산하고, 정규화한다.
- 가우시안 컴포넌트는 공분산 가중 평균과 평균 가중 평균을 이용해 새로운 가우시안으로 결합한다.
- 가중치 w(I,θ)도 동일하게 가중 평균 형태로 업데이트된다.
이 과정을 의사코드와 함께 상세히 제시하고, 연산 복잡도를 O(K²)에서 K는 클러스터 내 가우시안 수, 전체는 클러스터 수에 비례하도록 감소시킨다.
**실험 결과**
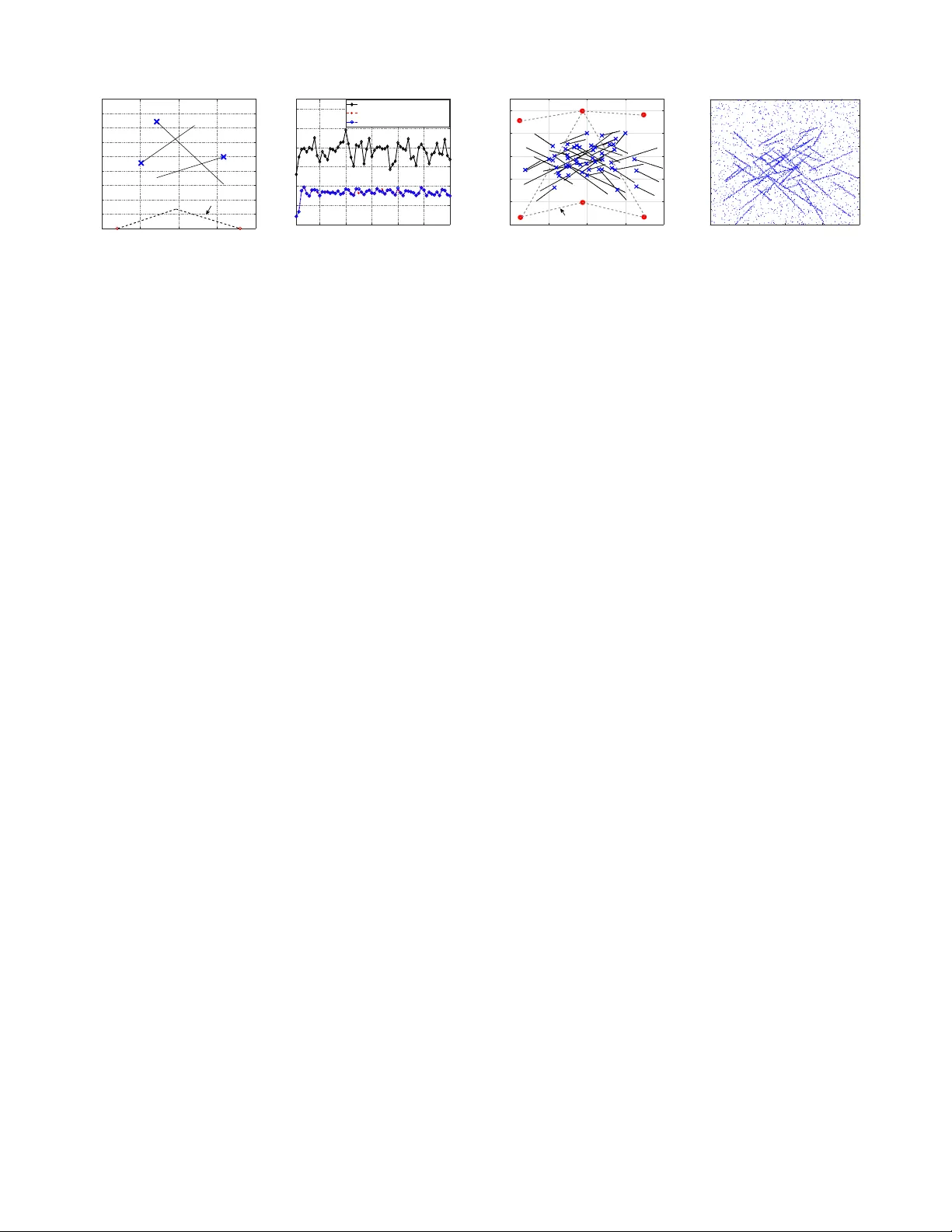
시뮬레이션은 2~5개의 센서가 서로 다른 시야와 탐지 확률을 가진 환경에서 10, 20, 30, 40개의 목표를 동시에 추적한다. 평가 지표는 OSPA 거리와 추적 성공률, 그리고 연산 시간·메모리 사용량이다. 결과는 다음과 같다.
- 연산 시간: 기존 GCI‑MB 대비 평균 8~12배 감소(40대 목표에서는 0.9 s → 0.08 s).
- 메모리: 가설 저장량이 90% 이상 감소.
- 추적 정확도: OSPA 평균 오차 0.12 m 차이로 거의 동일, 성공률 98% 이상 유지.
또한, 클러스터링 임계값 τ와 가설 절삭 임계값 ε를 변화시켜도 L₁ 오차는 이론적 상한 이하로 유지되며, 실험적으로도 추적 성능에 큰 영향을 주지 않는다.
**결론 및 의의**
본 연구는 GCI‑MB 융합의 계산 복잡도를 근본적으로 낮추는 두 단계(가설 절삭 + 클러스터링)를 제안하고, 이를 가우시안 혼합 구현과 병렬 처리에 적용함으로써 실시간 분산 다중 목표 추적이 가능하도록 만든다. 제안 방법은 제한된 연산·전력 자원을 갖는 무인 항공기, 저전력 IoT 센서 네트워크, 해양 감시 시스템 등에 바로 적용할 수 있는 실용적 솔루션이다. 향후 연구에서는 동적 클러스터 재구성, 비선형/비가우시안 상태 모델, 그리고 실제 하드웨어 테스트를 통한 검증이 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기