고차원 혼돈 시스템 예측을 위한 딥 LSTM‑하이브리드 모델
본 논문은 다층 LSTM 구조와 시스템의 불완전한 경험적 모델을 결합한 하이브리드 예측 방법을 제안한다. Mackey‑Glass와 Kuramoto‑Sivashinsky 두 혼돈 시스템에 대해 RMSE와 ACC 지표로 성능을 평가했으며, 다층 LSTM만 사용할 때 발생하는 급격한 발산을 효과적으로 억제하고 장기 예측 정확도를 크게 향상시켰음을 보였다.
저자: Youming Lei, Jian Hu, Jianpeng Ding
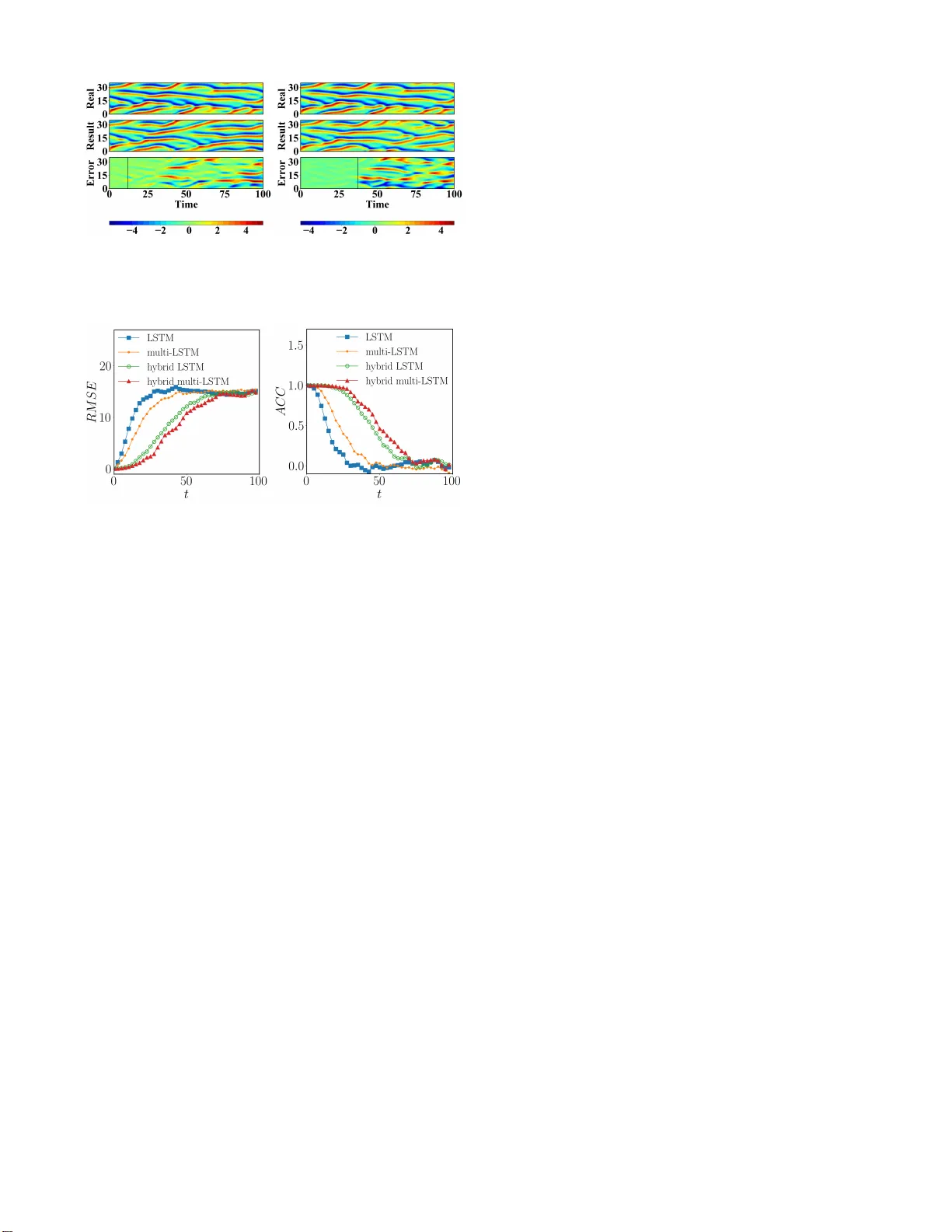
본 논문은 고차원 혼돈 시스템의 장기 예측 문제를 해결하기 위해, 다층 LSTM(Deep LSTM) 구조와 시스템의 불완전한 경험적 모델을 결합한 하이브리드 예측 방법을 제안한다. 서론에서는 혼돈 시스템이 초기 조건에 민감하고 복잡한 프랙탈 구조를 가지므로, 순수 물리 모델(미분 방정식 기반)이나 순수 데이터‑기반 블랙박스 모델만으로는 장기 예측에 한계가 있음을 강조한다. 최근 Reservoir Computing(RC)과 LSTM을 이용한 연구가 진행되고 있으나, 깊은 RNN이 과적합 및 발산 문제를 겪는 경우가 많다. 이러한 배경에서 저자들은 경험적 모델이 제공하는 물리적 제약을 활용해 LSTM의 학습을 보조하고, 동시에 LSTM의 비선형 표현력을 이용해 복잡한 동역학을 포착하고자 한다.
II. 하이브리드 방법에서는 먼저 일반적인 RNN과 LSTM의 수식적 정의를 제시한다. LSTM 셀은 입력 게이트 iₜ, 망각 게이트 fₜ, 출력 게이트 oₜ, 셀 상태 cₜ, 은닉 상태 hₜ로 구성되며, 각 게이트는 시그모이드와 tanh 함수를 통해 업데이트된다. 다층 LSTM은 이러한 셀을 N개의 층으로 쌓아, 각 층의 출력이 다음 층의 입력이 되도록 설계한다. 손실 함수는 평균 제곱 오차와 L2 정규화 항을 포함하며, 전체 데이터셋에 대한 평균으로 정의된다. 최적화는 Adam 알고리즘을 사용하고, 학습률은 에포크마다 γ · η 로 감소시켜 수렴 안정성을 높인다.
경험적 모델 E는 시스템의 근사 미분 방정식으로 가정하고, 파라미터 오차 ε를 포함한다. 이 모델은 현재 상태 xₜ를 입력받아 다음 상태를 예측하는데, 정확도가 완전하지 않다. 하이브리드 구조에서는 훈련 단계에서 xₜ와 E(xₜ)를 결합한 벡터
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기