분산 제어를 위한 Youla 연산자 상태공간 프레임워크와 안정적 구현
본 논문은 연산자 형태의 이산시간 선형 시스템을 이용해 Youla 파라미터화를 확장하고, 네트워크 구조에 맞는 안정적으로 구현 가능한 분산 제어기를 설계하는 YOSS(Youla Operator State‑Space) 프레임워크를 제시한다. 구조적 가정이 만족될 경우 안정성·성능 문제를 볼록 최적화, 특히 모델 매칭 형태로 변환해 임의의 정확도로 해결할 수 있음을 보이며, 새로운 분리 원리를 통해 전정보형 및 출력피드백 제어기의 설계와 구현을 일…
저자: Mohammad Naghnaeian, Petros G. Voulgaris, Nicola Elia
본 논문은 현대 사이버‑물리 시스템에서 필연적으로 발생하는 대규모 분산 구조와 통신 지연·제한을 고려한 제어기 설계 문제에 접근한다. 저자들은 먼저 이산시간 선형 시스템을 ‘연산자(operator)’ 형태로 재정의한다. 연산자는 무한 차원의 하삼각 행렬로, 입력‑출력 관계를 시퀀스 공간 ℓ_∞ 혹은 ℓ_p 위에서 정의한다. 이 연산자 표현은 LTI, LTV, 스위칭, 지연 시스템을 모두 포괄할 수 있으며, 특히 네트워크의 통신 구조가 연산자 계수(ˆA,ˆB,ˆC,ˆD)의 희소성·하삼각 형태로 직접 반영된다.
다음으로, 전통적인 Youla 파라미터화 기법을 연산자 공간 ℛ_stable에 확장한다. 시스템 연산자 G와 네트워크 구조에 의해 정의된 두 보조 연산자 G₁, G₂를 도입하고, 제어기 K를
K = K₀ + (I‑G₂Q)(I‑G₁Q)⁻¹
형태로 표현한다. 여기서 Q∈ℛ_stable는 자유롭게 선택 가능한 안정 연산자이며, K₀는 기본(무제어) 시스템을 나타낸다. Q가 안정 연산자이면 K 자체가 자동으로 ‘안정적으로 실현 가능(stably realizable)’하게 된다. 이는 기존 You라 파라미터 기반 설계에서 종종 발생하던 내부 불안정(unstable pole‑zero cancellation) 문제를 근본적으로 방지한다.
구조적 제약을 수학적으로 다루기 위해 저자들은 ‘subspace‑like’ 가정을 제시한다. 구체적으로, 네트워크가 허용하는 입력‑출력 매핑 집합 S가 연산자 곱셈에 대해 닫혀 있고, S가 선형 서브스페이스를 형성한다면, 안정성 및 성능 요구조건을 다음과 같은 모델 매칭 형태로 변환할 수 있다.
‖T₁ + T₂ Q T₃‖ < 1, Q∈ℛ_stable
여기서 T₁, T₂, T₃는 사전에 정의된 안정 연산자이다. 이 부등식은 ℓ₂, ℓ₁, ℓ_∞ 등 다양한 성능 지표에 대해 볼록 최적화 문제로 변환 가능하며, 기존 LMI 기반 방법이 갖는 차수 제한이나 근사성 문제를 피한다. 특히, 임의의 정확도 ε>0에 대해 Q를 구할 수 있음을 증명함으로써, 최적해에 대한 수렴성을 보장한다.
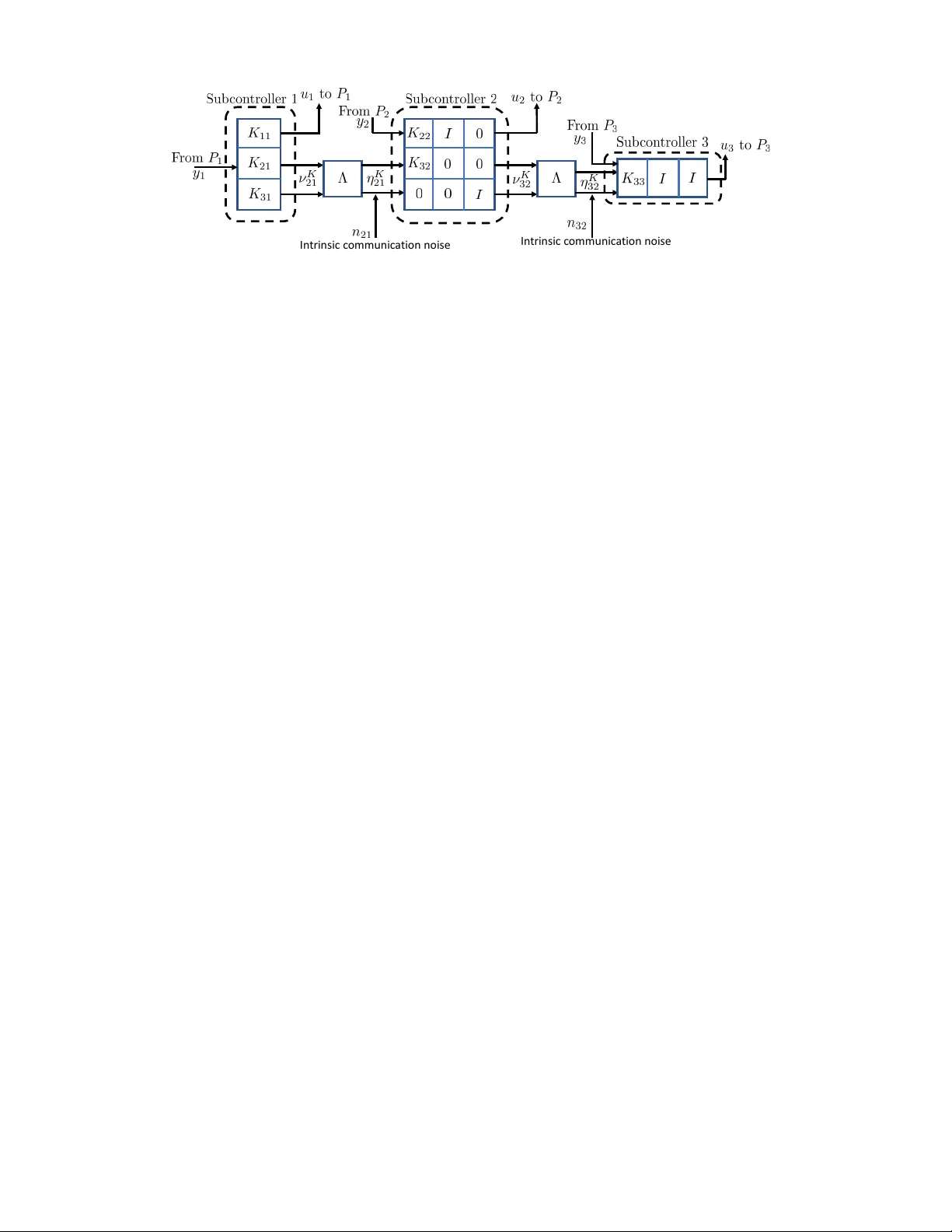
논문은 또한 ‘전정보형(full‑information‑like)’ 컨트롤러를 정의한다. 전정보형 컨트롤러는 상태 x와 측정 출력 y를 동시에 이용해 제어 입력을 생성한다:
u =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기