복소값 신경망의 유한시간 반동기화와 비동기 가변 지연 제어
본 논문은 복소값 신경망(CVNN) 마스터‑슬레이브 구조에 비동기적이며 시간에 따라 변하는 유한한 지연이 존재할 때, 오차 상태가 유한시간 내에 1에서 0으로 수렴하도록 하는 반동기화(anti‑synchronization) 제어법을 제시한다. 복소값 함수를 실·허수 부분으로 분해하고, 일반화된 {ξ,∞}‑노름과 Lyapunov‑함수를 이용해 충분조건을 도출하였다. 제시된 두 단계(1→1, 1→0) 제어 스킴은 전체 수렴 시간이 유한함을 보장하며…
저자: Xiwei Liu, Zihan Li
본 논문은 복소값 신경망(CVNN)의 마스터‑슬레이브 구조에 비동기적이며 시간에 따라 변하는 유한한 지연이 존재할 때, 두 네트워크 사이의 반동기화(anti‑synchronization)를 유한시간 내에 달성하는 제어 방법을 제시한다. 연구는 크게 네 부분으로 구성된다.
첫째, 모델링 단계에서 복소값 뉴런 상태 x_j ∈ ℂ를 실수와 허수 부분으로 분리하고, 복소수 곱셈을 2×2 실수 행렬 M을 이용해 a·b = b_a^T M_R b_b + i b_a^T M_I b_b 형태로 변환한다. 이를 통해 원래의 복소값 신경망(5)과 슬레이브 신경망(9)을 각각 두 개의 실값 신경망(7)·(8) 및 (10)·(11)으로 정확히 분해한다.
둘째, 비동기 가변 지연 τ_jk(t) (0 ≤ τ_jk(t) ≤ τ)와 복소값 활성화 함수 f_k, g_k에 대해 두 가지 가정을 둔다. 가정 1은 f_k와 g_k가 실·허수 부분으로 분리된 홀함수임을, 가정 2는 각각의 편미분이 양의 상수 λ, γ에 의해 제한되는 Lipschitz 연속성을 만족함을 명시한다. 이를 기반으로 행렬 Λ_k, Γ_k, eΛ_k, eΓ_k를 정의해 시스템의 비선형 항을 선형 상한으로 포장한다.
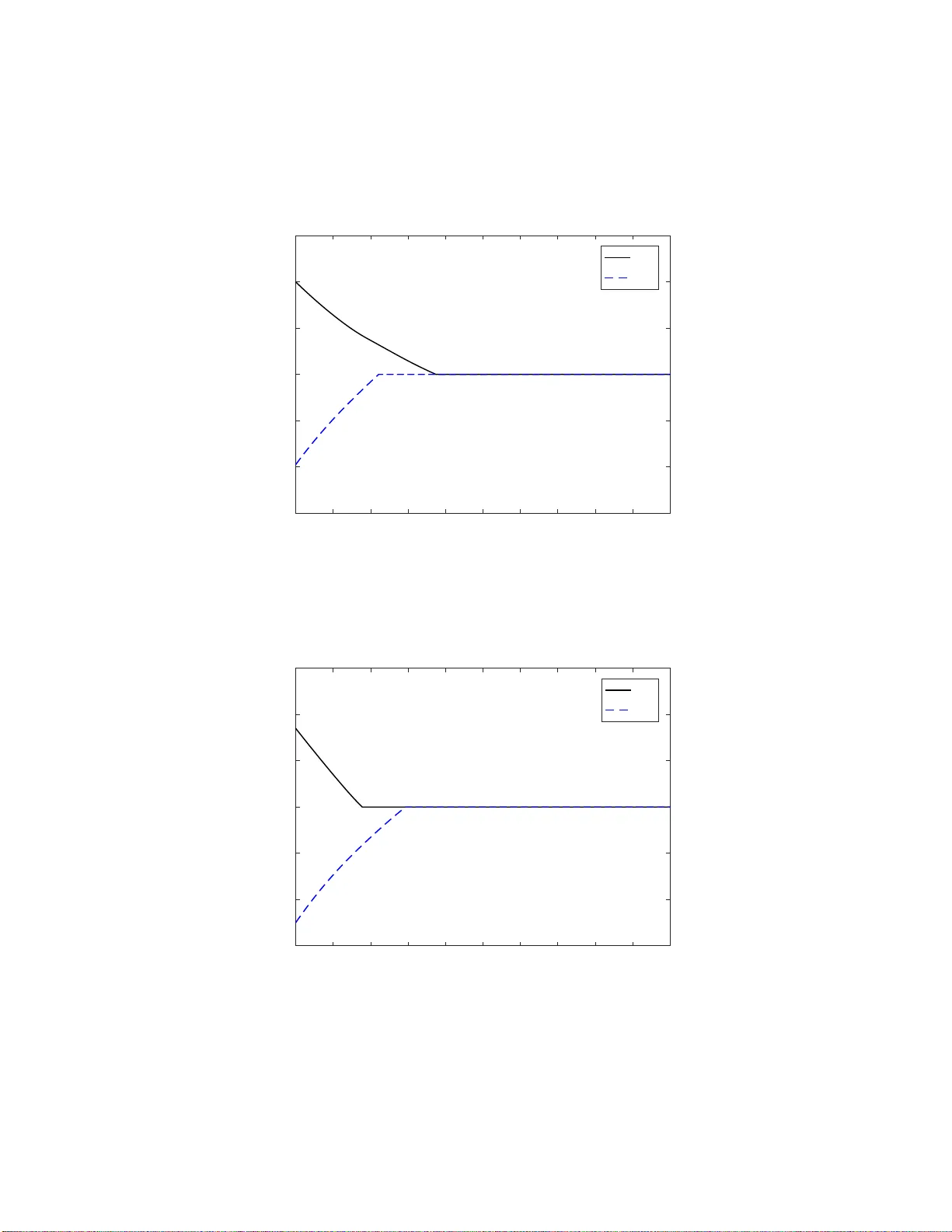
셋째, 제어 설계 단계에서는 오차 e_j(t)=x_j(t)+y_j(t) 를 정의하고, 실·허수 오차 e_Rj, e_Ij에 대해 각각 sign 함수와 두 종류의 비선형 감쇠 항을 포함한 제어 입력 u_Rj(t), u_Ij(t)를 설계한다. 구체적으로
u_Rj(t)=−sign(e_Rj(t))
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기