산업용 트랙터‑트레일러의 동적 모델링 및 실시간 궤적 추적 제어
본 논문은 트랙터‑트레일러 시스템의 동적 효과를 고려한 궤적 추적 제어기를 제안한다. 트랙터와 첫 번째 트레일러 사이에 2‑축 힘 센서를 설치해 실시간으로 끌어당김·밀어내는 힘을 측정하고, 이를 모델에 포함한다. 추진력‑스로틀 매핑을 5차 다항식으로 근사해 파라미터를 실험 데이터로 추정한다. 제안된 제어법은 Lyapunov 이론으로 전역 수렴을 증명했으며, 전동식 전시 차량 실험을 통해 높은 추적 정확도를 확인하였다.
저자: Hongchao Zhao, Zhe Liu, Zhiqiang Li
본 논문은 산업 현장에서 널리 사용되는 트랙터‑트레일러 시스템의 궤적 추적 제어를 다루며, 기존 연구가 주로 기구학적 모델에 의존하고 동적 효과를 무시한다는 문제점을 지적한다. 이를 해결하기 위해 저자들은 두 가지 핵심 기술을 도입한다. 첫 번째는 트랙터와 첫 번째 트레일러 사이에 2축 힘 센서를 설치해, 트레일러가 트랙터에 가하는 수평·수직 힘(Hx, Hy)을 실시간으로 측정한다는 점이다. 이 힘은 트레일러의 질량, 관성, 적재 하중, 트레일러 간 거리 변화 등 복합적인 동적 요인을 포함하고 있어, 별도의 파라미터 식별 없이도 트랙터의 동적 모델에 직접 반영할 수 있다.
두 번째는 추진력‑스로틀 매핑을 5차 다항식으로 근사한 것이다. 실험적으로 다양한 스로틀 개방값(0~300)과 속도(0~5 m/s)에서 측정된 추진력을 기반으로 최소제곱법으로 다항식 계수를 추정했으며, 5차식이 가장 높은 적합도를 보였다. 이를 통해 스로틀 명령 u1을 직접 추진력 Fp= u1·VT·Φ 로 변환함으로써, 제어 설계 단계에서 힘을 직접 다루는 것이 가능해졌다.
동적 모델은 뉴턴‑오일러 기반의 1‑트랙 모델을 사용한다. 전후 차축을 중간 휠로 대체하고, 전후 차축 거리(a, b), 센서 위치(c), 차량 질량(m), 관성(J) 등을 고려해 다음과 같은 상태 방정식을 도출한다:
- 위치( xg, yg ), 요각 θ, longitudinal 속도 vx를 상태 변수로 채택
- 스티어링 ψ와 추진력 Fd를 입력으로 사용
- 비홀론믹 제약을 적용해 v_y와 θ̇을 vx와 ψ의 함수로 변환
- 최종적으로 식 (9)~(12) 형태의 동적 방정식을 얻는다.
제어 설계는 가상 입력 ω1(회전률)과 ω2(추진력)를 정의하고, 이를 실제 입력 u1(스로틀), u2(스티어링)와 연결한다. Lyapunov 함수 V1=½(xe²+ye²+θe²+ve²)와 V2=V1+½δψ²를 이용해, ω1, ω2를 적절히 설계하면 궤적 오차와 속도 오차가 전역적으로 수렴함을 증명한다. 구체적으로, ω1은 θe, xe, ye를 이용한 비선형 식 (29)으로 정의되고, ω2는 Hx, Hy, ϕ1~ϕ3, ve 등을 포함한 식 (30)으로 정의된다.
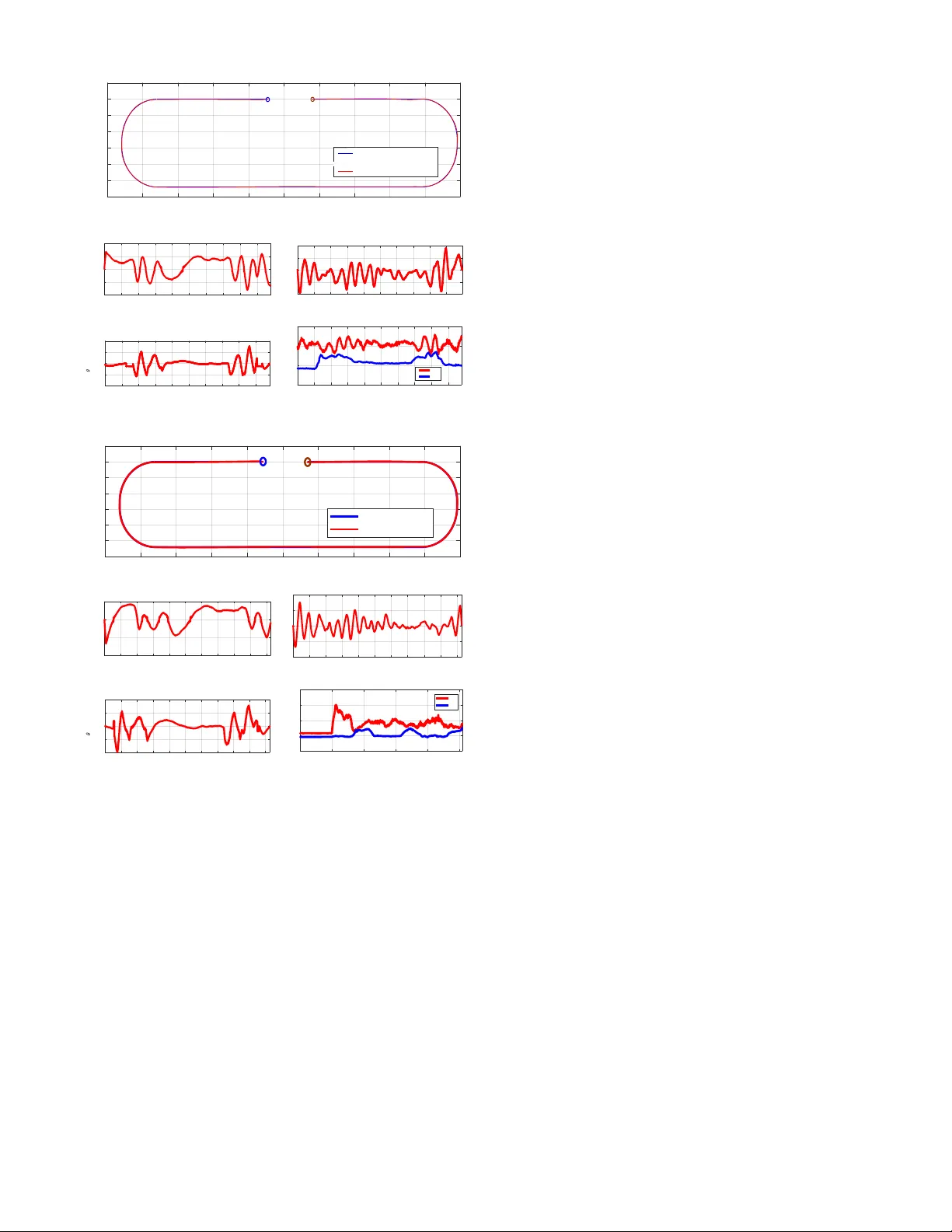
실제 구현에서는 스로틀과 브레이크를 전환하는 논리(Fd>0이면 스로틀, <0이면 브레이크)를 적용하고, 스티어링 동작을 1차 지연(τ) 모델로 근사한다. 힘 센서에서 측정된 Hx, Hy는 EKF 기반 힘 추정기를 통해 보정된다. 실험은 전동식 전시 차량에 적용했으며, 다중 트레일러(최대 3대)와 다양한 적재 하중 조건에서 궤적 추적을 수행했다. 결과는 위치 오차가 0.2 m 이하, 자세 오차가 2° 이하로, 기존 기구학 기반 제어에 비해 현저히 높은 정확도를 보였다. 또한, 시스템은 급제동·가속 상황에서도 안정적으로 동작했으며, 제어 입력의 실시간 보정 덕분에 트레일러 수가 증가해도 성능 저하가 거의 없었다.
결론적으로, 본 연구는 동적 모델링, 실시간 힘 측정, 고차 다항식 추진력 매핑, 그리고 Lyapunov 기반 안정성 증명을 하나의 프레임워크로 통합함으로써, 산업용 트랙터‑트레일러 자동화에 실용적인 솔루션을 제공한다. 향후 연구는 다중 트레일러 간 상호작용을 보다 정밀히 모델링하거나, 모델 예측 제어(MPC)와 결합해 고속 주행 및 복잡한 환경에서도 적용 가능한 고성능 제어기로 확장할 여지가 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기