간헐적 통신을 위한 다중 에이전트 제어 합성: 메트릭 시간 논리 접근법
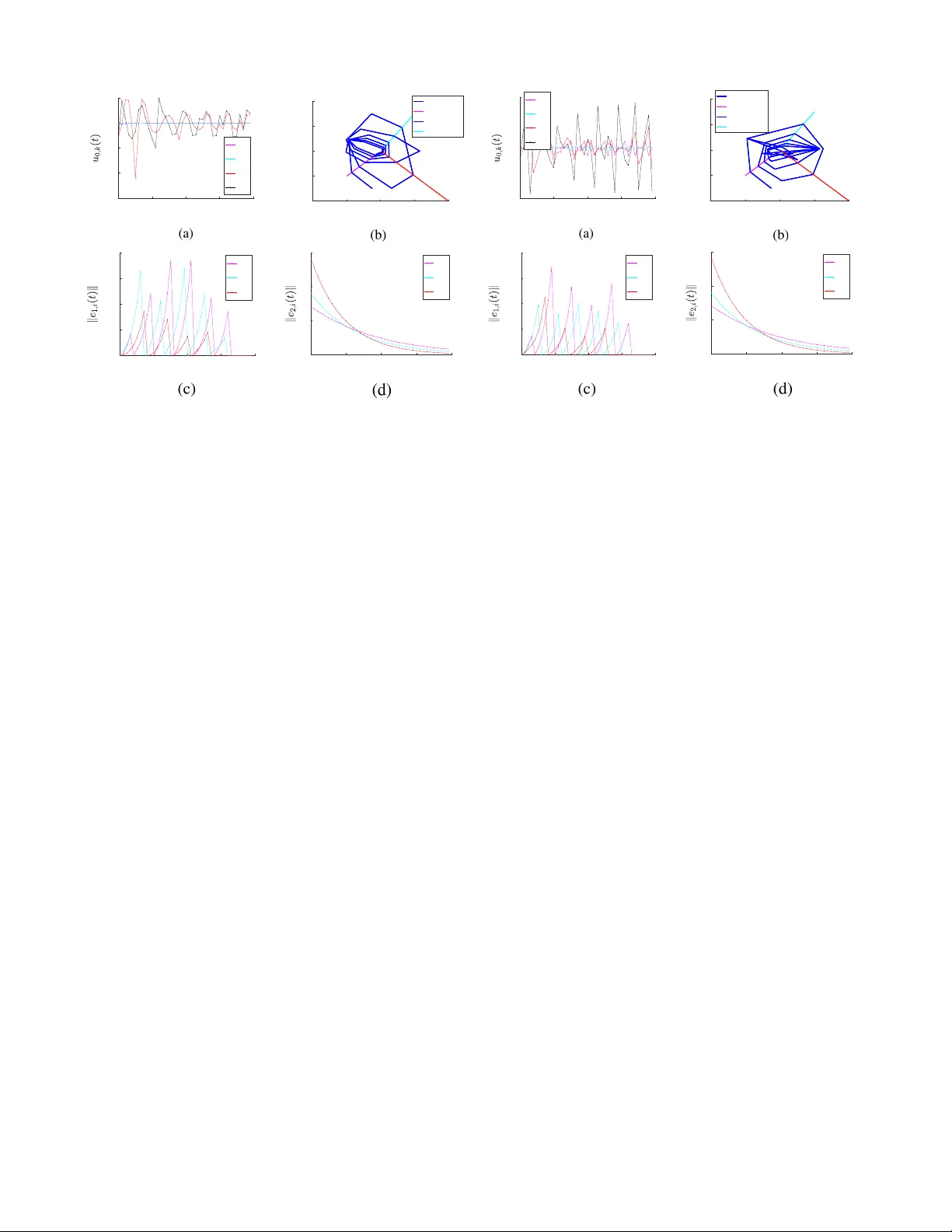
본 논문은 절대 위치 센서를 갖지 않은 팔로워들이 리더의 간헐적 상태 정보를 통해 합의를 달성하도록 설계된 스위치드 시스템을 대상으로, 최대·최소 체류시간(dwell‑time) 조건을 메트릭 시간 논리(MTL)로 표현하고, 리더의 배터리 충전·특정 구역 체류와 같은 실용적 제약을 동시에 만족시키는 최적 제어 입력을 반복적인 MILP 기반 합성 방법으로 제시한다. 시뮬레이션에서는 3대 모바일 로봇 팔로워와 1대 쿼드로터 리더가 사용되었다.
저자: Zhe Xu, Federico M. Zegers, Bo Wu
본 논문은 절대 위치 센서를 갖지 않은 팔로워들이 리더의 간헐적 상태 정보를 통해 목표 합의 상태에 도달하도록 설계된 다중 에이전트 시스템(MAS)을 다룬다. 기존 연구들은 지속적인 통신을 전제로 하거나, 네트워크가 강하게 연결되어야 함을 요구했지만, 실제 모바일 로봇 환경에서는 통신 차단, 전력 제한, 센서 오류 등으로 인해 이러한 가정이 깨진다. 이를 해결하기 위해 저자들은 리더‑팔로워 구조를 채택하고, MAS를 스위치드 시스템으로 모델링한다.
시스템 모델은 다음과 같다. 리더와 팔로워 i의 상태는 각각 선형 시간 불변(LTI) 방정식으로 기술되며, 팔로워는 외란 d_i(t)와 센서 오차를 포함한다. 팔로워는 상대 위치 센서만을 사용하므로 절대 좌표를 직접 측정할 수 없으며, 따라서 오차가 시간에 따라 누적된다. 리더는 절대 위치 센서를 갖고, 통신 반경 R 내에 있는 팔로워와 디지털 채널을 통해 상태 정보를 교환한다. 서비스 시점 t_i^s에서는 ‖y_i(t)−y_0(t)‖≤R이고 통신 채널이 켜져 있을 때만 정보가 전달된다.
팔로워는 관측 오차 e₁,i(t)=\hat{x}_i(t)−x_i(t)와 목표 오차 e₂,i(t)=x_g−\hat{x}_i(t) 두 개의 오류 변수를 정의한다. 관측 오차는 리더가 서비스를 제공하기 전까지는 연속적인 동역학 \dot e₁,i = A e₁,i − d_i를 따르고, 서비스 시점에 즉시 0으로 리셋된다. 목표 오차는 \dot e₂,i = −k_i e₂,i 로 지수적으로 감소한다. 여기서 k_i는 설계 가능한 양의 상수이다.
안정성과 합의를 보장하기 위해 두 가지 체류시간(dwell‑time) 조건을 도출한다. 첫 번째는 최대 체류시간 τ_max으로, 서비스 간격이 이보다 길어지면 관측 오차가 사전에 정의한 상한 V_T를 초과하게 된다. 수학적으로는
t_i^{s+1}−t_i^{s} ≤ (1/λ_max(A))·ln
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기