자율주행차를 위한 적응형 강인 게임 이론 기반 의사결정
본 논문은 레벨‑k 게임 이론을 활용한 자율주행차의 의사결정 프레임워크에 모델 불확실성을 고려한 적응형 강인 제어를 결합한다. 차량 동역학 모델과 인간 운전자의 행동 예측 사이의 불일치를 교정하기 위해, 다른 차량의 공격성(레벨‑0·1) 추정에 대한 신뢰도를 실시간으로 업데이트하고, 이 신뢰도에 따라 방해(불확실성) 집합의 크기를 조절한다. 최소‑최대(Min‑Max) 전략을 사용해 최악의 교란에 대비하면서도, 과도한 보수성을 완화해 차선 변경 …
저자: Gokul S. Sankar, Kyoungseok Han
본 논문은 자율주행차(AV)가 인간 운전 차량(HV)과 혼재된 교통 환경에서 안전하고 효율적인 주행을 수행하기 위해, 레벨‑k 게임 이론과 최소‑최대(Min‑Max) 강인 제어를 결합한 적응형 의사결정 프레임워크를 제안한다.
1. **연구 배경 및 문제 정의**
- AV는 인간 운전자의 비합리적·제한된 합리성 때문에 예측이 어려운 상황에 직면한다. 기존 레벨‑k 게임 이론은 인간 운전자를 레벨‑0(본능적)·레벨‑1(다른 차량을 레벨‑0으로 가정)으로 구분해 행동을 예측하지만, 모델 불일치와 교란(센서 노이즈, 동역학 오차 등) 때문에 보수적인 강인 제어가 필요하게 된다.
- 고정된 교란 집합을 사용하는 전통적 강인 MPC는 교란이 클 경우 과도하게 보수적인 행동을 유도해 교통 흐름을 저해하고, 반대로 비강인 제어는 충돌 위험을 증가시킨다.
2. **차량 동역학 및 교란 모델**
- 이산형 5자유도 차량 모델(위치 x, y, 요잉각 ψ, 속도 v, 조향각 β)을 사용하고, 외란 wₓ, w_y를 포함한 컴팩트한 교란 집합 W = { w | ζ·w ≤ θ } 로 정의한다. 교란 집합은 원점을 포함하고, 크기 θ는 레벨‑k 추정 신뢰도에 따라 동적으로 조절된다.
3. **레벨‑k 게임 이론 적용**
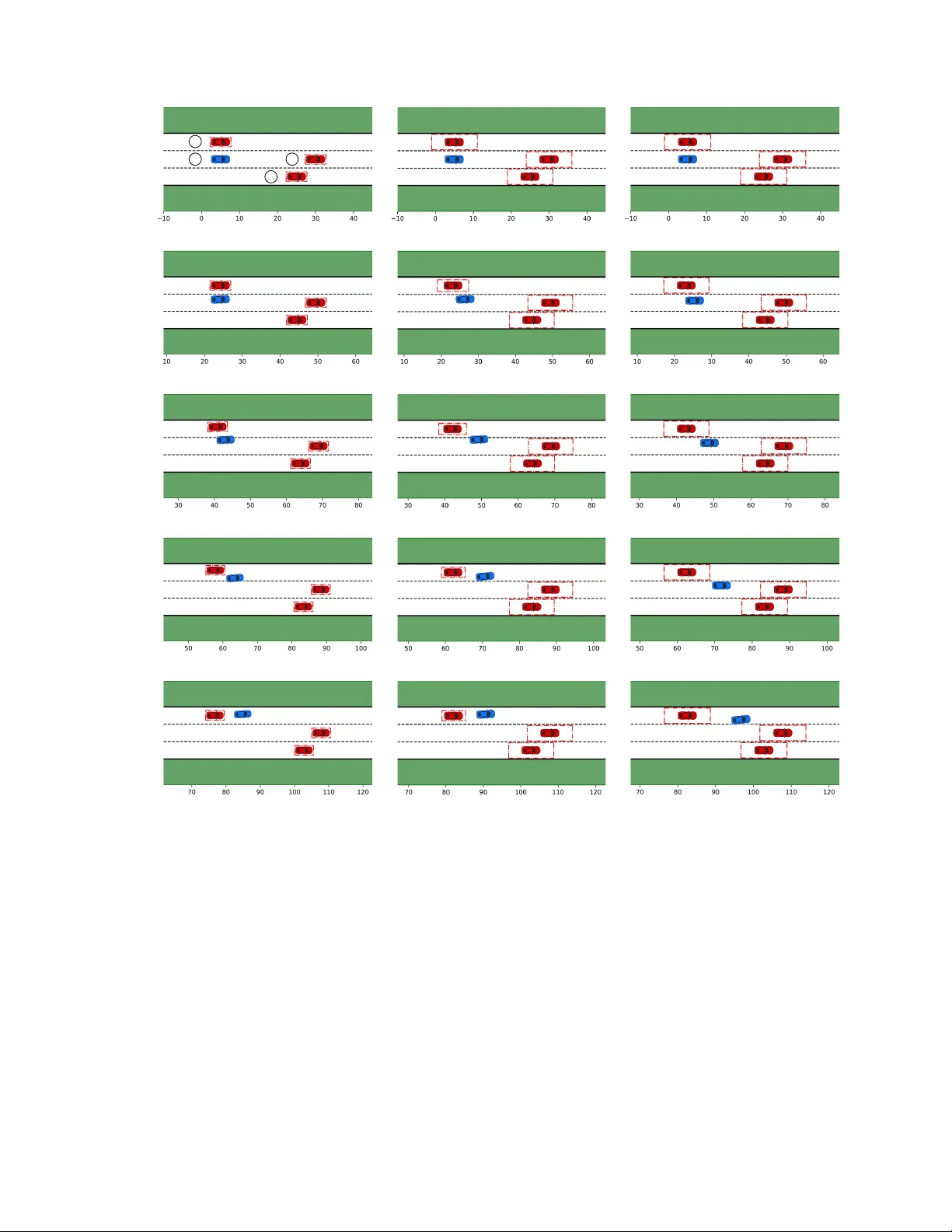
- 각 에이전트는 자신의 레벨 k에 따라 다른 에이전트를 레벨‑(k‑1)로 가정하고 행동을 예측한다. 레벨‑0은 주변 차량을 정적 장애물로 간주해 공격적인 행동을 보이며, 레벨‑1은 레벨‑0을 가정해 보다 신중한 행동을 취한다.
- AV는 다른 차량에 대해 레벨‑0·1 두 모델에 대한 확률 분포 P_{k}^{l,i}를 유지한다. 실제 관측된 행동 γ
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기