카시 로봇의 호버슈 자동 주행을 위한 피드백 제어 프레임워크
** 본 논문은 20 자유도 언더액추에이트 로봇인 Cassie가 두 개의 독립적인 호버슈 위를 자율적으로 주행하도록 하는 제어·인식·경로계획 시스템을 제시한다. 동역학을 간소화한 PD 기반 제어와 최소 센서(비주얼‑오도메트리·깊이 카메라)로 상태를 추정하고, Dijkstra 기반 전역 플래너와 Timed‑Elastic‑Band 기반 로컬 플래너를 결합해 장애물을 회피하면서 평지·경사·계단·거친 지형을 주행한다. 실험 결과, 속도·회전 추적,…
저자: Shuxiao Chen, Jonathan Rogers, Bike Zhang
**
본 논문은 다중 모달 이동성을 목표로, 20 자유도 언더액추에이트 로봇인 Cassie가 두 개의 독립적인 호버슈(Hovershoes) 위를 자율적으로 주행하도록 하는 종합 프레임워크를 제시한다. 연구 배경으로는 인간이 마이크로 모빌리티 플랫폼(세그웨이, 호버보드, 호버슈)을 이용해 다양한 지형을 효율적으로 이동하는 점을 로봇에도 적용하고자 하는 동기가 있다. 기존 연구에서는 다리와 휠이 결합된 로봇(예: DRC‑HUBO+, Boston Dynamics Handle)이나 세그웨이·호버보드와 같은 연결형 플랫폼을 사용했지만, 이들은 각각 무게와 복잡도, 혹은 자유도가 제한되는 단점이 있다. 반면 호버슈는 양쪽 발이 각각 독립적인 휠 플랫폼에 올라가므로, 발마다 별도 제어가 가능해 장애물 회피와 비정형 지형 주행에 유리하지만, 동시에 비연결형이기 때문에 제어 난이도가 크게 증가한다.
**도전 과제**는 크게 다섯 가지로 정리된다. 첫째, Cassie 자체가 20 DOF의 복잡한 언더액추에이트 시스템이며, 직접적인 휠 토크 제어가 불가능하다. 둘째, 호버슈는 민감하고 고동적이며, 두 발이 각각 독립적인 플랫폼에 올려져 있어 동기화가 필요하다. 셋째, 로봇은 호버슈 내부 상태(피치·요 토크)를 직접 측정하거나 명령할 수 없으며, 오직 접촉력을 통해 간접적으로만 영향을 줄 수 있다. 넷째, 초기 배치 시 호버슈 간 상대 위치·방향, 발의 오프센터 착지, 제조 공정에 따른 동적 차이 등 변동성이 존재한다. 다섯째, 실시간 장애물 회피를 위해 빠른 인식·계획이 요구된다.
**솔루션**은 세 가지 핵심 요소로 구성된다. (1) **동역학 모델링**: Cassie의 전체 Euler‑Lagrange 모델을 정의하고, 호버슈는 피치·요·속도·위치 네 개의 상태와 간단한 2차식(피치·요 토크, 전진 가속)으로 근사하였다. 접촉력 기반 토크 변환식을 (9)식으로 도출해, 로봇이 발에 가하는 힘을 통해 호버슈에 토크를 전달한다. (2) **제어 설계**: 전체 제어는 X‑Y 위치 제어, 속도·회전 제어, 그리고 기존 Cassie COM 균형 제어의 세 계층으로 나뉜다. X‑Y 제어는 외부‑내부 루프 구조를 사용해 호버슈 간 상대 x‑좌표를 0으로, y‑좌표는 요 회전과 전진을 결합해 비홀론믹 제약을 만족하도록 조정한다. 속도·회전 제어는 VIO‑SLAM으로 얻은 전역 속도와 요속도를 기반으로 목표 궤적을 추적한다. 균형 제어는 기존 Cassie용 LQR/PD 제어에 위 세 제어 신호를 외부 토크 보상으로 합산해, 호버슈가 급격히 움직이거나 외부 교란이 가해져도 로봇이 넘어지지 않게 한다. (3) **인식·경로계획**: 최소 센서(트래킹 카메라 + 깊이 카메라)로 VIO‑Mono와 ORB‑SLAM2를 결합해 실시간 포즈와 지도 구축을 수행한다. 전역 플래너는 Dijkstra 알고리즘으로 목표 지점까지 최단 경로를 계산하고, 로컬 플래너는 Timed‑Elastic‑Band(TEB)으로 동적 장애물 회피와 비홀론믹 제약을 동시에 만족하는 궤적을 실시간 생성한다.
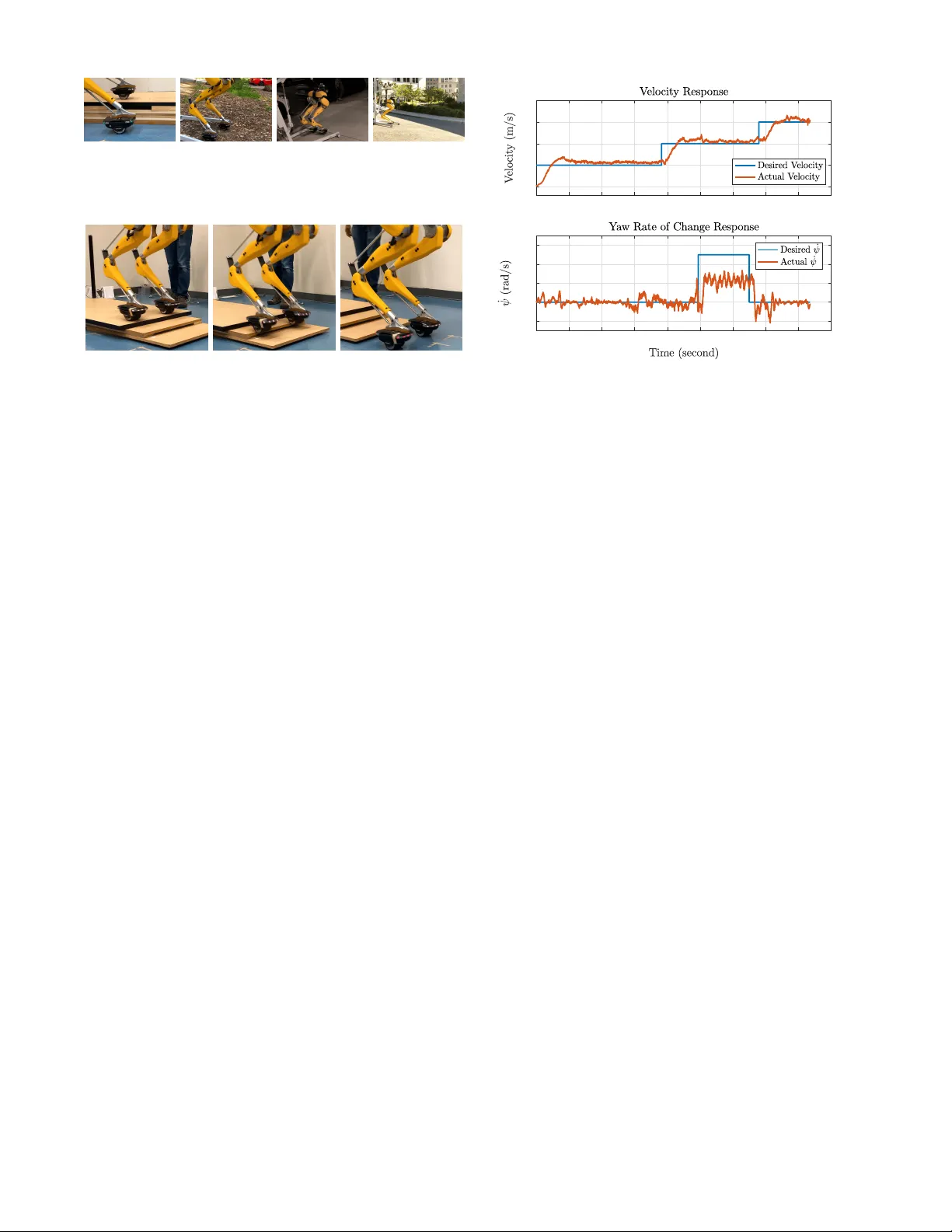
**실험**은 실내·실외 환경에서 다양한 지형(평지, 경사면, 계단, 거친 야외)과 장애물 코스를 대상으로 수행되었다. 실험 결과, Cassie는 호버슈 위에서 속도 0.5 m/s, 회전 속도 30 °/s 수준을 정확히 추적했으며, 급격한 90° 회전과 파동형 주행(양쪽 호버슈가 교대로 앞뒤로 움직이는 패턴)에서도 안정적으로 동작했다. 외부 푸시 교란 실험에서는 0.5 s 이내에 균형을 회복했으며, 초기 배치 오프셋(수십 센티미터·수도)에도 자동 보정이 가능했다.
**한계와 향후 연구**로는 현재 제어 파라미터가 경험적으로 튜닝되었으며, 호버슈 내부 파라미터 식별이 이루어지지 않아 모델 불확실성이 존재한다는 점을 들었다. VIO‑SLAM의 누적 오차가 장시간 주행 시 경로 편차를 초래할 수 있어, 고정밀 IMU·LiDAR 융합이나 백엔드 SLAM 최적화가 필요하다. 또한 현재는 PD 기반 단순 제어이므로, 비선형 모델 예측 제어(MPC)나 적응 제어를 도입해 동적 상호작용을 더 정밀히 보상하고, 복잡한 지형(예: 진동하는 플랫폼)에서도 안정성을 확보하고자 한다.
**결론**적으로, 본 연구는 복잡한 언더액추에이트 로봇이 독립적인 마이크로 모빌리티 플랫폼 위를 자율적으로 주행하도록 하는 최초의 통합 프레임워크를 제시했으며, 최소 센서와 간단한 PD 제어만으로도 다중 모달 이동성, 장애물 회피, 다양한 지형 주행을 실현할 수 있음을 입증하였다. 이는 향후 로봇이 실제 도시·산악·재난 현장에서 다양한 이동 수단을 자유롭게 전환하며 임무를 수행할 수 있는 기반 기술이 될 것으로 기대된다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기