딥 모델 레퍼런스 적응 제어
** 본 논문은 딥 뉴럴 네트워크(DNN)를 적응 요소로 활용한 모델 레퍼런스 적응 제어(DMRAC) 구조를 제안한다. 외부 레이어는 실시간으로, 내부 레이어는 배치 방식으로 업데이트하는 이중 시간 스케일 방식을 도입해 안정성을 확보하고, 전체 시스템의 추적 오차와 파라미터 오차가 Uniform Ultimate Boundedness(UUB)임을 이론적으로 증명한다. 또한 기존의 Concurrent Learning MRAC와 GP‑MRAC를 …
저자: Girish Joshi, Girish Chowdhary
**
본 논문은 딥 뉴럴 네트워크(DNN)를 활용한 새로운 신경 적응 제어 구조인 Deep Neural Network based Model Reference Adaptive Control(DMRAC)를 제안한다. 서론에서는 최근 딥러닝이 컴퓨터 비전·음성 인식·자율 주행 등 다양한 분야에서 뛰어난 성능을 보이고 있지만, 딥 강화학습(D‑RL)은 학습 과정에서 시스템 안정성을 보장하지 못해 안전‑중요 시스템에 적용하기 어렵다는 점을 지적한다. 반면, 모델 레퍼런스 적응 제어(MRAC)는 Lyapunov 기반의 안정성 분석을 통해 학습 중에도 시스템이 안정적으로 동작하도록 설계된다. 기존 MRAC는 주로 선형 파라미터화된 모델(예: RBF, GP)이나 단일 은닉층 신경망에 의존했으며, 딥 네트워크를 직접 적용하기 위한 이론적 기반이 부족했다.
논문의 주요 기여는 다음과 같다.
1) DNN을 적응 요소로 사용하는 MRAC 구조를 설계한다. DNN은 내부 레이어가 비선형 피처 Φ(x)를 생성하고, 최외곽 레이어의 가중치 W가 시스템 불확실성 Δ(x)를 근사한다.
2) 이중 시간 스케일 적응 방식을 도입한다. 외부 레이어(W)는 실시간으로 식(10)의 투영 기반 적응 법칙에 따라 업데이트되고, 내부 레이어(θ)는 배치 학습을 통해 주기적으로 재학습한다. 이를 통해 실시간 제어 루프에서는 저차원 파라미터만 조정되므로 Lyapunov 분석이 가능해진다.
3) 전체 DMRAC 시스템에 대해 Uniform Ultimate Boundedness(UUB)를 증명한다. 피처 전환에 대한 최악의 근사 오차 ε₂(x)를 정의하고, Lyapunov 후보 V(e, Ẇ)=eᵀPe+ẆᵀΓ⁻¹Ẇ를 사용해 V̇≤−eᵀQe+2eᵀP(ε₁+ε₂)임을 보인다. Q가 충분히 크면 V̇은 원점 근처를 제외하고 비양수가 되며, Barbalat 보조정리를 적용해 추적 오차와 파라미터 오차가 유한한 영역에 수렴함을 보인다.
4) 기존의 Concurrent Learning MRAC와 GP‑MRAC를 특수 경우로 포함한다는 점을 이론적으로 설명하고, 시뮬레이션을 통해 이를 실증한다.
시스템 모델링 부분에서는 매칭 불확실성 Δ(x)를 포함한 선형 시스템 ˙x=Ax+B(u+Δ(x))를 고려하고, 목표 레퍼런스 모델 ˙x_rm=A_rm x_rm+B_rm r을 정의한다. 제어 입력은 u=Kx+K_r r−ν_ad 로 구성되며, ν_ad는 DNN이 추정한 Δ̂(x)이다. DNN은 Φ(x)=φ_n(θ_{n‑1},…φ_1(θ_0,x)) 형태의 피처를 생성하고, 최외곽 가중치 W와 결합해 Δ̂(x)=WᵀΦ(x)로 표현한다.
학습 알고리즘은 두 단계로 나뉜다. (i) 실시간 적응 단계에서는 추적 오차 e(t)=x_rm−x를 이용해 W를 투영 기반 적응 법칙 ˙W=Γ proj(W,Φ(x)eᵀP) 로 업데이트한다. (ii) 배치 학습 단계에서는 수집된 (x,Δ̂) 쌍을 이용해 내부 레이어 θ를 SGD 혹은 Adam과 같은 최적화기로 학습한다. 이때 생성 네트워크를 활용해 Δ̂의 라벨을 생성한다는 점이 특징이다.
이론적 분석에서는 피처 집합 F에 대해 최악의 근사 오차 ε₁, ε₂를 정의하고, Lyapunov 함수 V의 미분을 전개해 V̇≤−eᵀQe+2eᵀP(ε₁+ε₂)임을 도출한다. ε₁, ε₂가 유한하고 Q가 충분히 큰 경우, V̇은 원점 근처를 제외하고 비양수가 되므로 e와 Ẇ는 유한한 집합에 수렴한다. 또한 파라미터 W는 투영 연산을 통해 상한 W_b를 초과하지 않도록 보장한다.
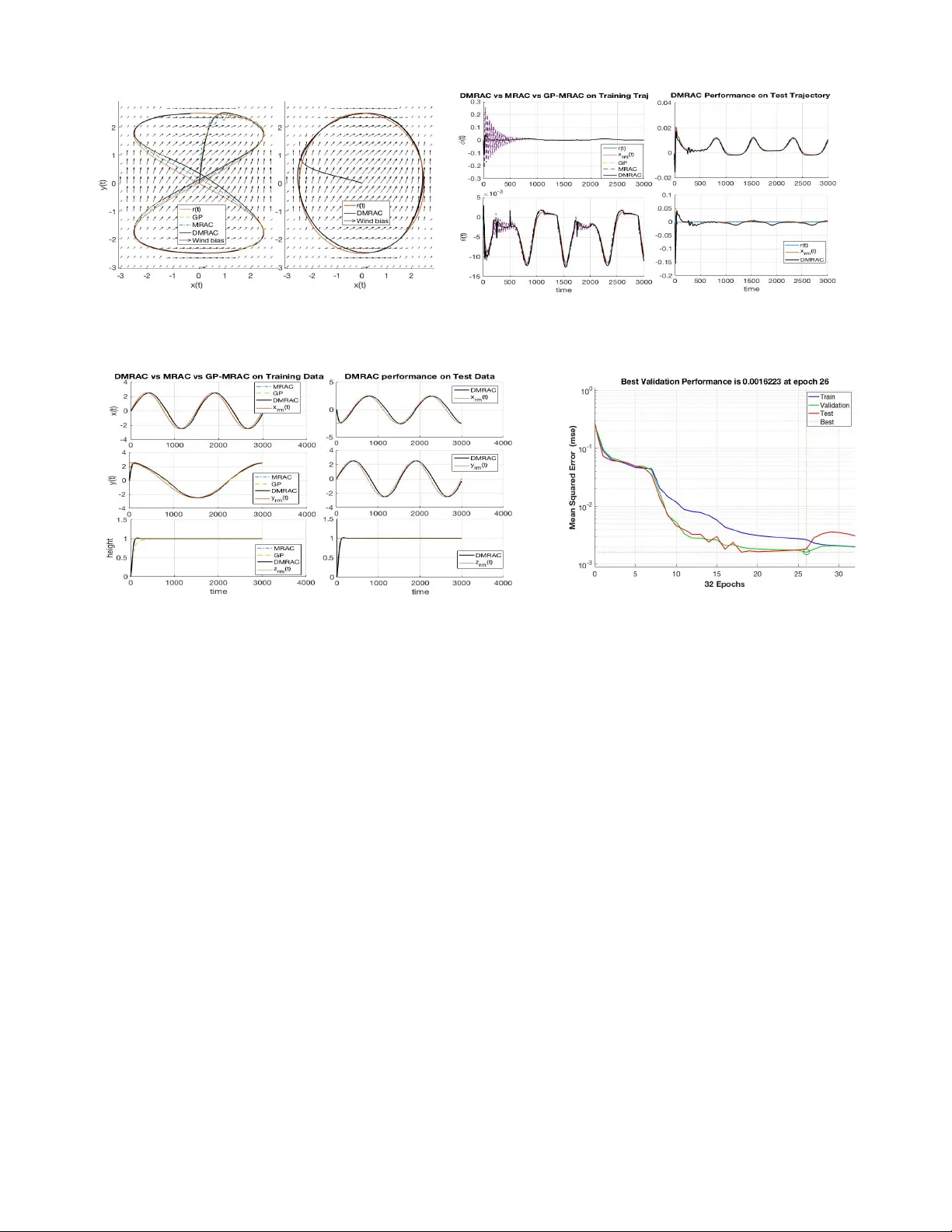
시뮬레이션에서는 2차 비선형 시스템에 대해 DMRAC, 기존 MRAC, GP‑MRAC, Concurrent Learning MRAC를 비교한다. 결과는 DMRAC이 가장 빠른 수렴 속도와 가장 작은 정착 오차를 보이며, 외란이 지속적으로 변하는 경우에도 추적 오차가 제한된 범위 내에 머무른다. 특히 DNN의 깊은 피처 표현이 복잡한 비선형성을 효과적으로 근사함을 확인한다.
결론에서는 DMRAC이 딥러닝의 표현력과 MRAC의 안정성 보장을 동시에 제공함을 강조한다. 또한 제안된 이중 시간 스케일 적응 메커니즘이 강화학습, 모델 기반 RL 등 다른 딥러닝 기반 제어 프레임워크에도 적용 가능함을 제시하며, 향후 연구 방향으로 실시간 배치 학습 효율화와 하드웨어 구현을 제시한다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기