전천후 모델 기반 사족보행 계획 및 제어를 위한 하이브리드 제로다이내믹스 접근
본 논문은 하이브리드 제로다이내믹스(HZD) 기법을 사족보행 로봇에 확장하여, 걷기·앰블링·트로팅 등 다양한 보행 형태를 전천후 모델 기반으로 설계·최적화·안정화하는 통합 프레임워크를 제시한다. 직접 콜로케이션 기반 비선형 프로그래밍으로 최적 궤적을 생성하고, 포인케 섹션 분석과 선형·이중선형 행렬 부등식(LMI·BMI) 최적화를 통해 고차원(36 상태·12 입력) 시스템의 지수적 안정성을 보장한다. Vision 60 로봇 실험을 통해 시뮬레이…
저자: Wen-Loong Ma, Kaveh Akbari Hamed, Aaron D. Ames
본 논문은 하이브리드 제로다이내믹스(HZD) 이론을 사족보행 로봇에 적용해 전천후 모델 기반 보행 계획·제어 프레임워크를 구축한 최초의 연구이다. 서론에서는 기존 이족보행에 대한 HZD 성공 사례와 사족보행 연구가 주로 모델 축소(질량‑무시, 선형화, 평면화) 방식에 의존해 안정성 보장이 부족함을 지적한다. 이어 사족보행 로봇 Vision 60을 13‑링크(바디+4×3 관절) 구조로 모델링하고, 전체 자유도 18(위치·방향 포함)와 제어 입력 12를 정의한다. 접촉 상황에 따라 서포트 풋 수 k에 따라 연속 도메인 Dᵥ를 설정하고, 제약식 hᵥ(q)=0·˙hᵥ(q,˙q)=0·Nᵥ≥0·hˢ,ᵥ(q)≥0 로 표현한다. 각 도메인에서 라그랑지안 기반 Euler‑Lagrange 방정식에 접촉 제약 Jᵥ(q)·¨q+˙Jᵥ(q,˙q)·˙q=0을 추가해 제약 동역학을 얻고, 이를 제어 가능한 ODE ˙x=fᵥ(x)+gᵥ(x)u 로 변환한다. 출력 함수 y(q,t)=yₐ(q)−Bᵥ(t)를 정의하고, 입력‑출력 피드백 선형화 u_io(x,t)=A(x)⁻¹(L(x,t)−2εy−ε²˙y) 로 시간 기반 트래젝터리를 추적한다. 이때 ε>0는 수렴 속도를 조절하는 파라미터이며, 결과적으로 y와 ˙y는 지수적으로 0으로 수렴한다.
이산 도메인에서는 리프트‑오프와 임팩트 두 가지 전이를 모델링한다. 리프트‑오프는 접촉력 Nᵥ=0이 되면 상태가 동일하게 전달되는 단순 매핑으로 처리하고, 임팩트는 플라스틱 충돌 모델을 사용해 속도에 점프를 부여한다.
보행 궤적 생성은 FR‑OST 툴박스를 이용한 직접 콜로케이션 기반 비선형 프로그래밍(NLP)으로 수행된다. 목적함수는 ∑‖u‖² 를 최소화해 토크 사용을 최소화하고, 제약조건은 (1) 닫힌 루프 동역학, (2) 하이브리드 연속성·주기성, (3) 물리적 실현 가능성(관절 한계, 마찰 피라미드, 발 높이 등)이다. 초기 추정값을 제공하고, 오픈‑루프 문제로 워밍업한 뒤 닫힌‑루프 문제를 풀어 최적 궤적을 얻는다. 결과적으로 걷기, 앰블링, 트로팅 3가지 보행을 각각 262.13 s, 42.69 s, 116.05 s 내에 생성하였다.
생성된 궤적이 반드시 안정적인 것은 아니므로, 안정화 단계에서는 포인케 섹션 분석을 적용한다. 비자율 시스템의 확대 상태 xₐ=(x, t)를 정의하고, 반환 맵 Pₐ(xₐ, ξ) 를 통해 다음 스텝을 계산한다. 여기서 ξ는 각 도메인에서 출력 함수에 적용되는 파라미터이다. Jacobian A(ξ)=∂Pₐ/∂xₐ의 고유값이 단위 원 안에 들어가도록 ξ를 설계한다. 이를 위해 1차 민감도 분석을 통해 비선형 반환 맵을 선형 근사하고, 선형·이중선형 행렬 부등식(LMI·BMI) 형태로 변환한다. BMI 최적화는 LMI 제약을 만족하면서 고유값을 최소화하도록 반복 수행한다. 알고리즘은 수렴할 때까지 파라미터 ξ를 업데이트한다.
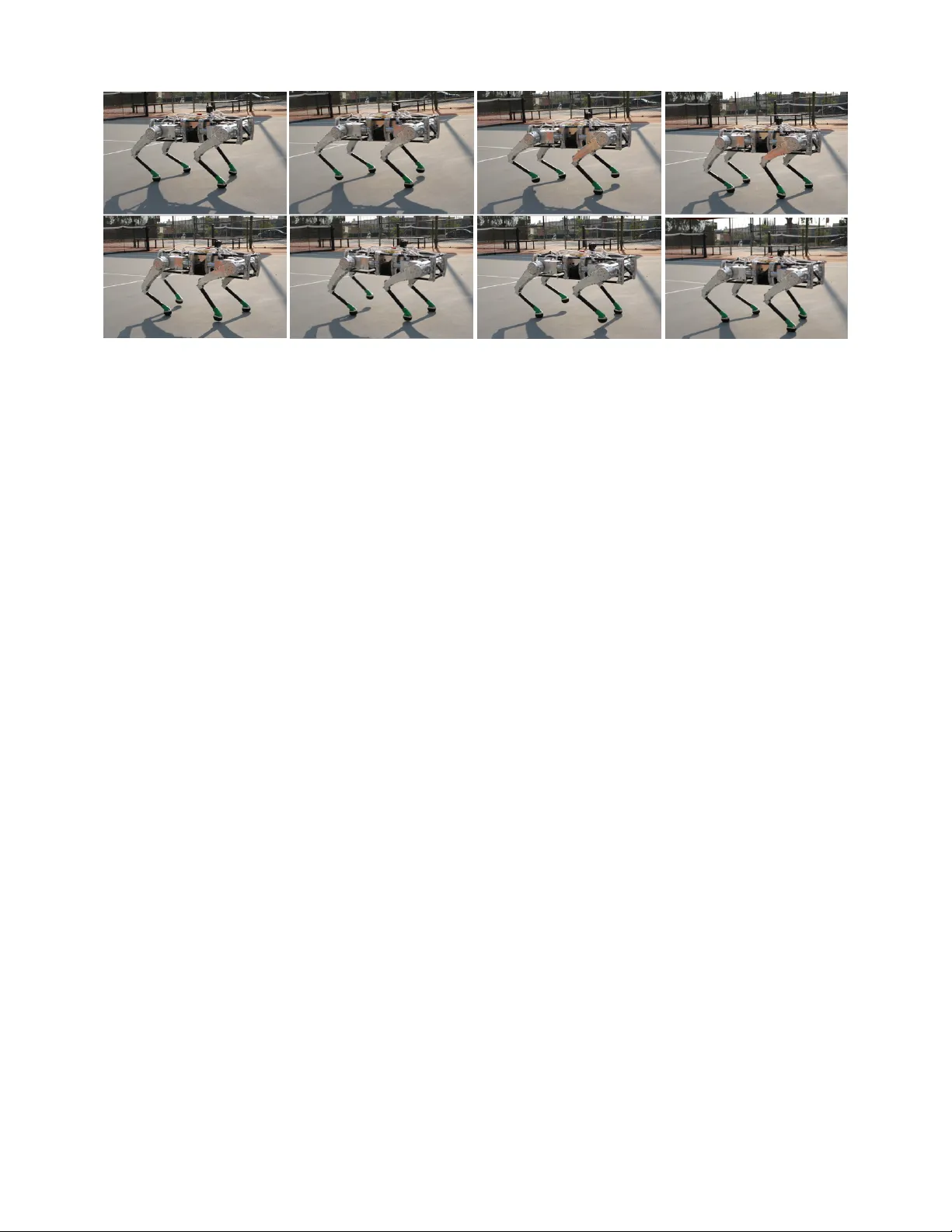
실험에서는 Vision 60 로봇에 설계된 앰블링 컨트롤러를 적용해 실제 지면에서 5 m 이상 연속 보행을 성공시켰으며, 시뮬레이션과 동일한 주기와 토크 프로파일을 보였다. 실험 데이터는 관절 위치·속도, 접촉력, 전류 등을 포함해 모델과의 일치성을 검증하였다.
결론에서는 전천후 모델 기반 HZD 프레임워크가 고차원 사족보행 로봇의 보행 생성·안정화에 효과적임을 강조한다. 향후 연구로는 계산 효율성 향상, 비플라스틱 충돌·마찰 모델 고도화, 그리고 달리기·점프와 같은 고속·고에너지 행동에 대한 확장을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기