시간변화 시스템을 위한 동적 워터마킹 기반 재생공격 탐지 기법
본 논문은 기존 동적 워터마킹이 적용되던 선형 시불변(LTI) 모델을 넘어, 선형 시변(LTV) 시스템에 적용 가능한 새로운 프레임워크를 제시한다. 시간에 따라 변하는 시스템 행렬을 보정하기 위한 행렬 정규화 인자를 설계하고, 이를 이용한 실시간 통계 검정법을 제안한다. 제안 방법은 일반화된 재생 공격(generalized replay attack)을 이론적으로 검증하고, 시변 차량 모델 시뮬레이션을 통해 공격 탐지 성능을 입증한다.
저자: Matthew Porter, Pedro Hespanhol, Anil Aswani
본 논문은 사이버‑물리 시스템(CPS)에서 외부 통신을 이용한 제어·감시가 필수적인 상황에서 발생할 수 있는 재생 공격(replay attack)의 위험성을 다루며, 기존에 선형 시불변(LTI) 시스템에만 적용 가능했던 동적 워터마킹(Dynamic Watermarking) 기법을 선형 시변(LTV) 시스템으로 확장한다.
**1. 서론 및 배경**
CPS는 네트워크 기반 제어와 물리적 프로세스가 결합된 복합 시스템으로, 외부 공격에 취약하다. 특히, 측정값을 기록해 두었다가 재생하는 재생 공격은 시스템 상태를 왜곡시키면서도 탐지가 어려워 실세계에서 큰 피해를 초래한다. 기존의 방어 기법은 주로 전통적인 사이버 보안 도구에 의존하거나, 수동적인 감시(χ², CUSUM, MEWMA)만을 제공한다. 그러나 이러한 방법은 공격자가 시스템 동작을 모방하거나 재생할 경우 탐지에 한계가 있다.
동적 워터마킹은 제어 입력에 비밀 잡음(워터마크)을 삽입하고, 측정 잔차와 워터마크 사이의 상관관계를 이용해 공격을 탐지한다. 이 방법은 LTI 시스템에 대해 강력한 이론적 보증을 제공했지만, 차량, 드론 등 시간에 따라 동역학이 변하는 시스템에는 직접 적용할 수 없었다.
**2. 연구 목표 및 기여**
저자들은 LTV 시스템에서도 동적 워터마킹을 적용하기 위해 다음 세 가지 주요 기여를 제시한다.
1) LTV 시스템에 맞는 통계 검정식을 설계하기 위해 행렬 정규화 인자를 도입하고, 이를 기반으로 기존 LTI 검정(잔차·워터마크 상관 검정)을 확장한다.
2) 일반화된 재생 공격 모델을 정의하고, 비제로 비대칭 파워(persistent attack)를 갖는 공격에 대해 탐지가 보장되는 이론적 증명을 제공한다.
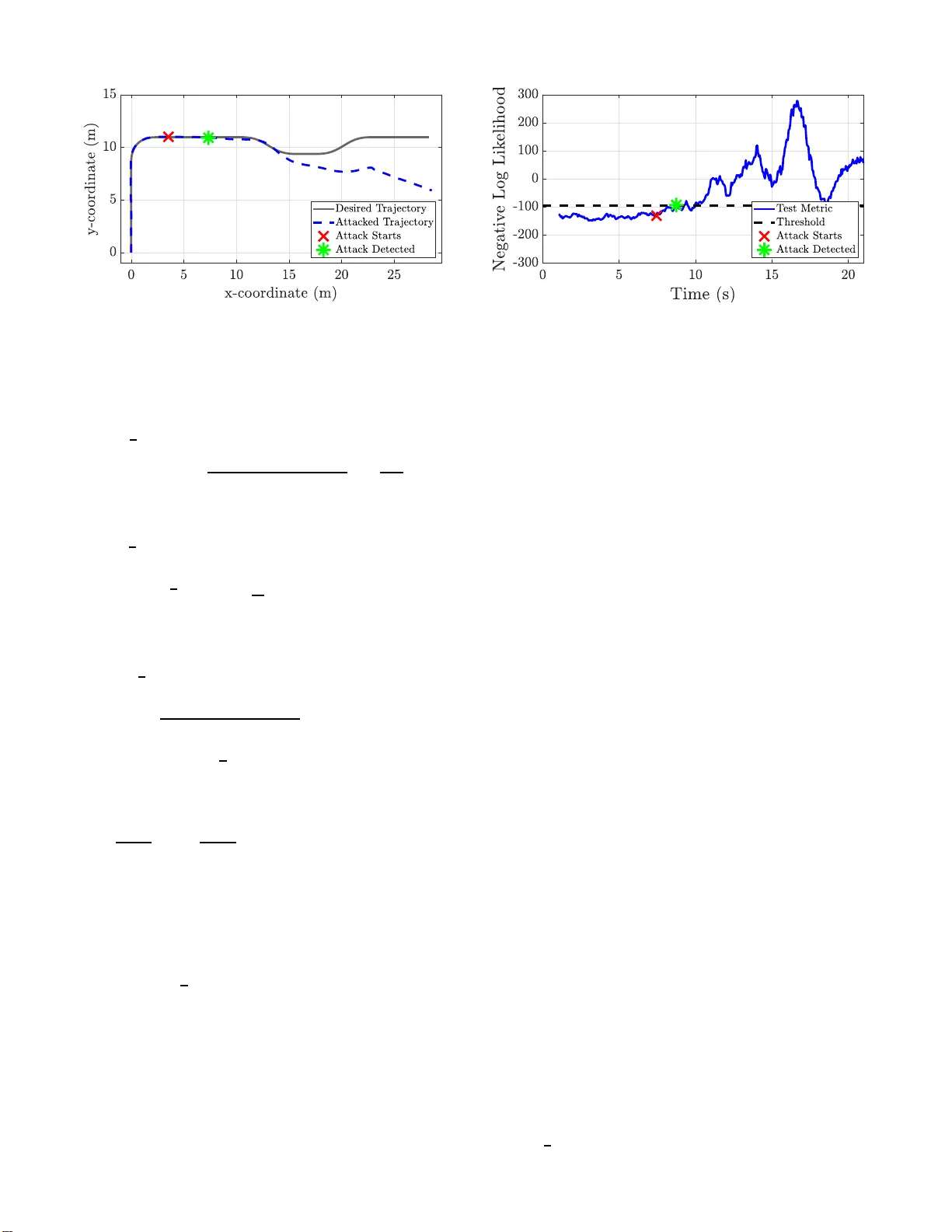
3) 시변 차량 모델을 이용한 시뮬레이션을 통해 제안 방법의 실효성을 검증하고, 제어 성능 저하를 최소화하면서도 높은 탐지 정확도를 달성한다.
**3. 시스템 모델 및 가정**
시변 시스템은 다음과 같이 정의된다.
- 상태 방정식: xₙ₊₁ = Aₙ xₙ + Bₙ Kₙ ẋₙ + Bₙ eₙ + wₙ
- 측정 방정식: yₙ = Cₙ xₙ + zₙ + vₙ
여기서 wₙ, zₙ는 각각 프로세스·측정 노이즈이며, eₙ은 제어 입력에 삽입되는 워터마크이다. 워터마크는 고정 공분산 Σ_e를 가지는 다변량 가우시안이며, 제어기와 관측기는 이를 완전히 알고 있다. 시스템 행렬 Aₙ, Bₙ, Cₙ은 시간에 따라 변하지만, 각 시점에서 (Aₙ + BₙKₙ)와 (Aₙ + LₙCₙ)의 스펙트럼 반경이 1보다 작아 안정성을 보장한다는 가정이 추가된다.
**4. 일반화된 재생 공격 모델**
공격자는 측정값에 다음과 같은 변형을 가한다.
vₙ = α(Cₙ xₙ + zₙ) + Cₙ ξₙ + ζₙ
ξₙ₊₁ = (Aₙ + BₙKₙ) ξₙ + ωₙ
α는 스케일링 계수이며, ξₙ와 ζₙ는 각각 공격자가 조작한 가짜 상태와 가짜 측정 노이즈이다. ωₙ와 ζₙ는 독립적인 가우시안 노이즈이며, 공격자는 ξₙ와 ζₙ의 공분산을 선택해 잔차 공분산을 정상 상태와 동일하게 만들 수 있다. 이때 α = –1이면 전통적인 재생 공격과 동일해진다.
**5. 통계 검정 설계**
LTI 경우, 잔차와 워터마크의 결합 행렬 Sₙ은 슬라이딩 윈도우 길이 ℓ이 충분히 클 때 Wishart(ℓ, S) 분포를 따른다. 그러나 LTV에서는 Σₙ이 시점마다 변하므로 직접적인 Wishart 근사가 불가능하다. 이를 해결하기 위해 저자들은 다음과 같은 정규화 행렬을 도입한다.
Sₙ =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기