확률적 안전 보장을 위한 장벽 함수 기반 유한시간 검증 및 제어
본 논문은 유한시간 구간에서 확률적 동역학 시스템의 안전성을 보장하기 위해 확률 제어 장벽 함수(stochastic control barrier function)를 도입하고, 기대값 상한을 포함한 새로운 장벽 인증 조건을 SOS(sum‑of‑squares) 최적화 형태로 전환한다. 연속시간·이산시간 모두에 적용 가능하며, 제어 입력이 선형인 경우 다항 피드백 제어기를 합성해 지정된 안전 확률을 달성한다. 여러 사례 연구를 통해 검증·제어 성능을…
저자: Cesar Santoyo, Maxence Dutreix, Samuel Coogan
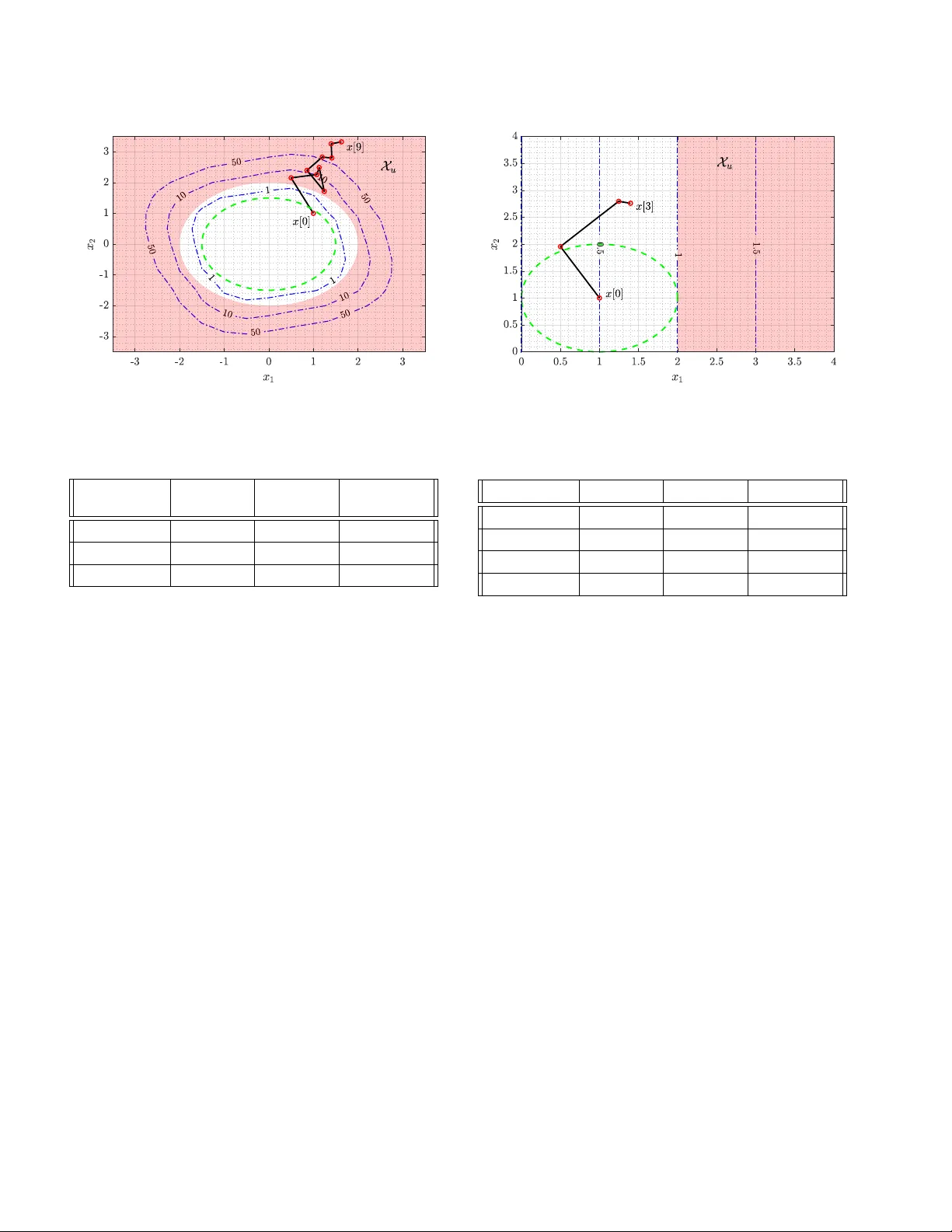
본 논문은 유한시간 구간에서 확률적 동역학 시스템이 안전 영역을 벗어날 확률을 정량화하고, 이를 보장하기 위한 제어 설계 방법을 제시한다. 연구 동기는 현대의 복잡하고 안전이 중요한 시스템—예를 들어 자율주행 차량, 물류 로봇, 스마트 그리드—이 외부 교란과 내부 불확실성에 노출되어 전통적인 결정론적 안전 검증으로는 충분히 다루기 어렵다는 점에 있다. 이러한 배경에서 확률적 제어 장벽 함수(stochastic control barrier function, SCBF)를 활용해 시스템이 위험 집합 X_u에 도달할 확률을 상한으로 제한한다.
논문은 먼저 연속시간(stochastic differential equation, SDE)와 이산시간(stochastic difference equation, SΔE) 두 형태의 시스템 모델을 정의한다. 연속시간 모델은
dx = F(x)dt + σ(x)dw,
이산시간 모델은
x_{k+1}=F(x_k)+σ(x_k)ξ_k,
와 같이 표현되며, 여기서 w는 Wiener 과정, ξ_k는 독립 확률 변수이다. 두 경우 모두 상태 공간 X는 컴팩트 집합으로 가정하고, 위험 집합 X_u와 초기 집합 X_0을 다항식으로 정의한다.
핵심 이론적 기여는 두 가지 장벽 인증 조건이다. 연속시간에서는 인피니티멀 제너레이터 A를 이용해 기대값의 시간 미분을 제한하는 부등식(7)을 도출한다. 이 부등식은 기존 초마팅게일 조건( A B ≤ 0 )을 일반화하여,
A B ≤ –α B + β,
형태로 α≥0, β≥0를 허용한다. α와 β는 각각 기대값 감소율과 증가 상한을 의미한다. 이 조건을 만족하는 다항식 B(x)와 라그랑주 승수 λ_i(x)를 찾으면, 초기 상태가 X_0에 있을 때 위험 집합에 도달할 확률 ρ_u는 정리 1에 제시된 세 가지 경우 중 하나에 따라 상한이 계산된다.
이산시간에서는 기대값 연산을 직접 다항식 형태로 전개한다.
E
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기