다중 쿼드로터를 위한 빠른 궤적 계획: 상대 안전 비행 통로 활용
본 논문은 복잡한 장애물 환경에서 다수의 쿼드로터가 충돌 없이 빠르게 비행하도록, 장애물 회피용 안전 비행 통로(SFC)와 두 에이전트 간 상대 안전 비행 통로(RSFC)를 결합한 새로운 궤적 계획 프레임워크를 제안한다. 초기 이산 경로는 그래프 기반 다중 에이전트 경로 탐색(MAPF, ECBS)으로 생성하고, 이를 기반으로 SFC와 RSFC를 구축한다. 베르누이 다항식의 볼록 껍질 특성을 이용해 비선형 충돌 제약을 선형 부등식으로 변환한 뒤,…
저자: Jungwon Park, H. Jin Kim
본 논문은 장애물 밀도가 높은 3차원 환경에서 다수의 쿼드로터가 동시에 비행할 수 있도록, 충돌 회피와 동적 제약을 동시에 만족하는 빠른 궤적 계획 방법을 제시한다. 연구의 핵심은 두 종류의 안전 비행 통로, 즉 장애물 회피용 안전 비행 통로(SFC)와 에이전트 간 상대 위치를 고려한 상대 안전 비행 통로(RSFC)를 결합하는 것이다.
먼저, 초기 이산 경로는 그래프 기반 다중 에이전트 경로 탐색(MAPF) 알고리즘 중 하나인 Enhanced Conflict-Based Search(ECBS)를 사용해 생성한다. ECBS는 최적 해에 대한 상한(c_w)을 지정함으로써 서브옵티멀하지만 빠른 경로를 제공한다. 초기 경로는 격자 맵 상의 정점들로 구성되며, 모든 에이전트의 경로 길이를 동일하게 맞추기 위해 가장 긴 경로에 맞춰 길이를 보정한다.
다음 단계에서는 SFC와 RSFC를 각각 구축한다. SFC는 각 에이전트의 초기 경로를 따라 축 탐색(axis‑search) 방식을 적용해 연속된 convex set(보통 직육면체)들을 생성한다. 각 convex set은 에이전트의 반경 r_i를 고려한 Minkowski 합을 통해 장애물과의 최소 거리 확보를 보장한다.
RSFC는 두 에이전트 i와 j 사이의 상대 경로 p_i,j = p_j - p_i 를 기반으로 만든다. 상대 충돌 영역 C_i,j^inter는 두 에이전트의 반경을 합한 크기의 직육면체(또는 z축에 다운워시 계수를 적용한 형태)로 정의한다. RSFC 후보는 ±x, ±y, ±z 여섯 방향으로 제한되며, 각 후보는 해당 방향으로 상대 위치가 양수인 경우에만 선택 가능하다. 후보 선택 과정에서 중복 전환을 최소화하기 위해 greedy 알고리즘(Alg. 1)을 적용한다. 이 알고리즘은 연속된 waypoint 구간을 가장 많이 포함하는 후보를 선택하고, 선택된 후보와 반대 방향 후보는 배제함으로써 전환 횟수를 최소화한다.
시간 구간 할당 단계에서는 모든 에이전트가 동일한 시간 스케줄 t_s를 공유하도록 설계한다. 이는 베르누이 다항식의 convex hull 특성을 활용해 SFC·RSFC 각각을 선형 부등식으로 변환하기 위함이다. 그러나 전체 시간 구간이 과도하게 늘어날 경우 결정 변수 수가 급증하므로, Alg. 2를 이용해 각 SFC·RSFC에 대한 부분 시간 구간을 추출하고, 이를 겹치도록 합쳐 최종 시간 구간을 최소화한다.
이후, 각 시간 구간에 대응하는 SFC·RSFC를 선형 부등식 형태로 QP에 삽입한다. 베르누이 다항식의 계수는 QP 변수이며, 목적 함수는 n차 미분(예: 가속도, 스냅)의 제곱합을 최소화한다. 이렇게 구성된 QP는 하나의 최적화 단계만 수행하면 되며, 비선형 거리 제약이나 정수 변수 없이도 충돌‑무충돌 궤적을 보장한다.
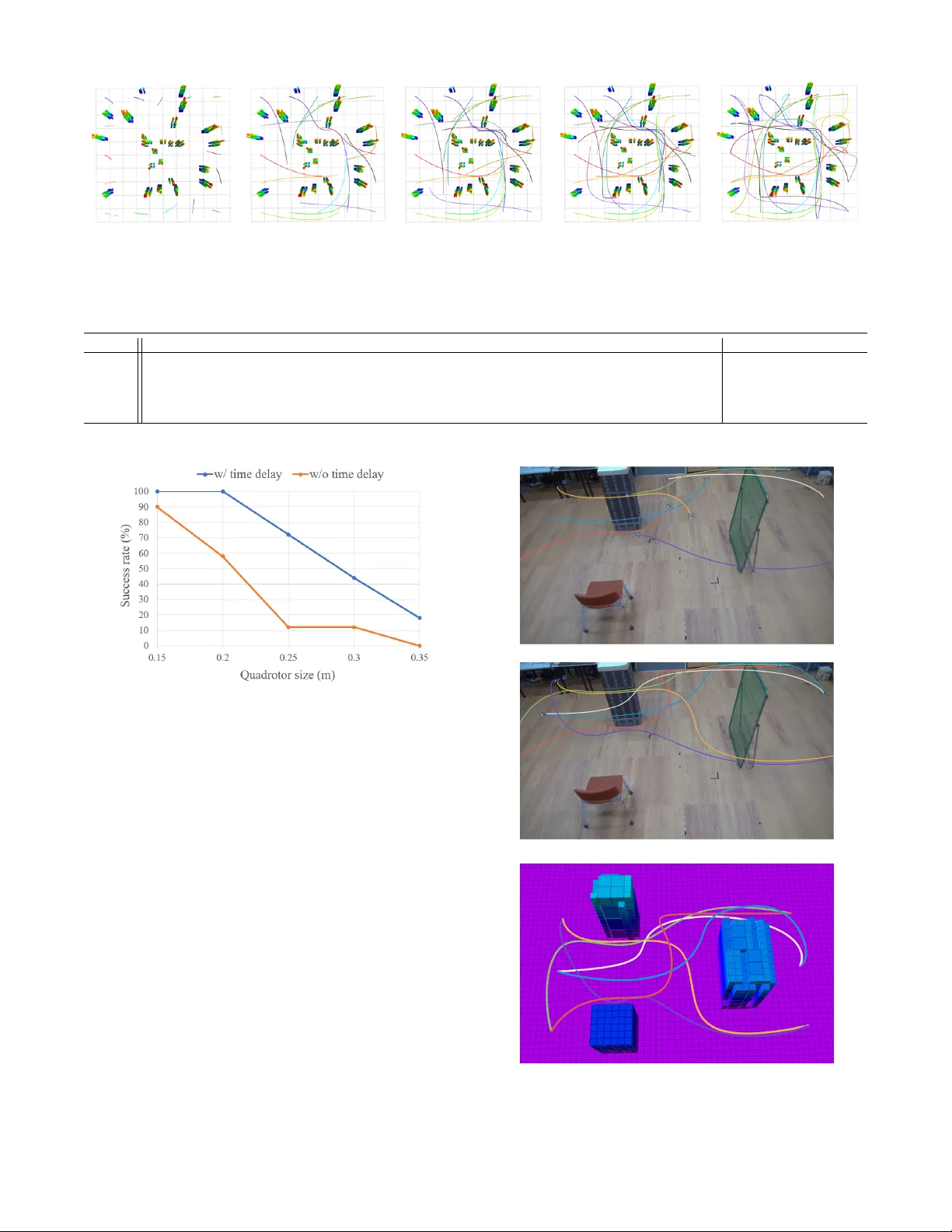
실험에서는 시뮬레이션과 실내 비행 테스트를 통해 16대와 64대 규모의 쿼드로터 스웜에 대해 각각 1초 이내, 1분 이내에 최적 궤적을 생성함을 확인했다. 특히 RSFC를 도입함으로써 좁은 통로에서 발생할 수 있는 교착 현상이 사라졌으며, 기존 MIQP 기반 방법 대비 연산 시간이 수백 배 단축되었다.
한계점으로는 모든 에이전트가 동일한 비행 시간을 공유해야 하는 제약이 있어, 비행 시간 차이가 큰 경우 추가적인 스케줄링이 필요할 수 있다. 또한, RSFC 후보를 6방향으로 제한함으로써 복잡한 3D 회피 상황에서 최적 경로를 놓칠 가능성이 있다. 향후 연구에서는 비동기식 시간 할당 및 후보 방향 확대, 그리고 동적 장애물에 대한 확장 등을 고려할 수 있다.
결론적으로, SFC와 RSFC를 결합한 선형 제약 기반 중앙집중형 QP 프레임워크는 다중 쿼드로터 시스템에서 실시간 수준의 충돌‑무충돌 궤적을 제공하며, 스케일러블하고 구현이 용이한 방법으로 평가된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기