비선형 동적 주기적 이벤트 트리거 제어와 패킷 손실 강인성
본 논문은 연속시간 비선형 시스템에 대해, 이미 알려진 안정화 피드백과 라야푸노프 함수를 이용해 동적 상태‑의존형 주기적 이벤트 트리거 제어(PETC) 메커니즘을 설계한다. 제안 기법은 평균적으로 기존 연속시간 수렴률을 유지하면서, 샘플링 주기를 비단조 라야푸노프 함수 이론으로 하한을 구해 크게 확대한다. 또한 연속적인 패킷 손실이 m번 이하로 제한될 경우에도 안정성을 보장하도록 설계되었다.
저자: Michael Hertneck, Steffen Linsenmayer, Frank Allg"ower
본 논문은 네트워크 기반 제어 시스템(NCS)에서 비선형 연속시간 동역학을 안정화하기 위한 새로운 주기적 이벤트 트리거 제어(PETC) 방식을 제안한다. 기존의 이벤트 트리거 제어(ETC)는 트리거 규칙을 연속적으로 평가해야 하는 구현상의 제약이 있었으며, PETC는 이를 일정한 샘플링 간격 h에서만 판단하도록 바꾸어 디지털 플랫폼에 적합하게 만들었다. 그러나 PETC는 연속시간 ETC가 제공하는 수렴 보장을 일반적으로 상실하므로, 비선형 시스템에 적용하기 위해서는 별도의 설계 기법이 필요했다.
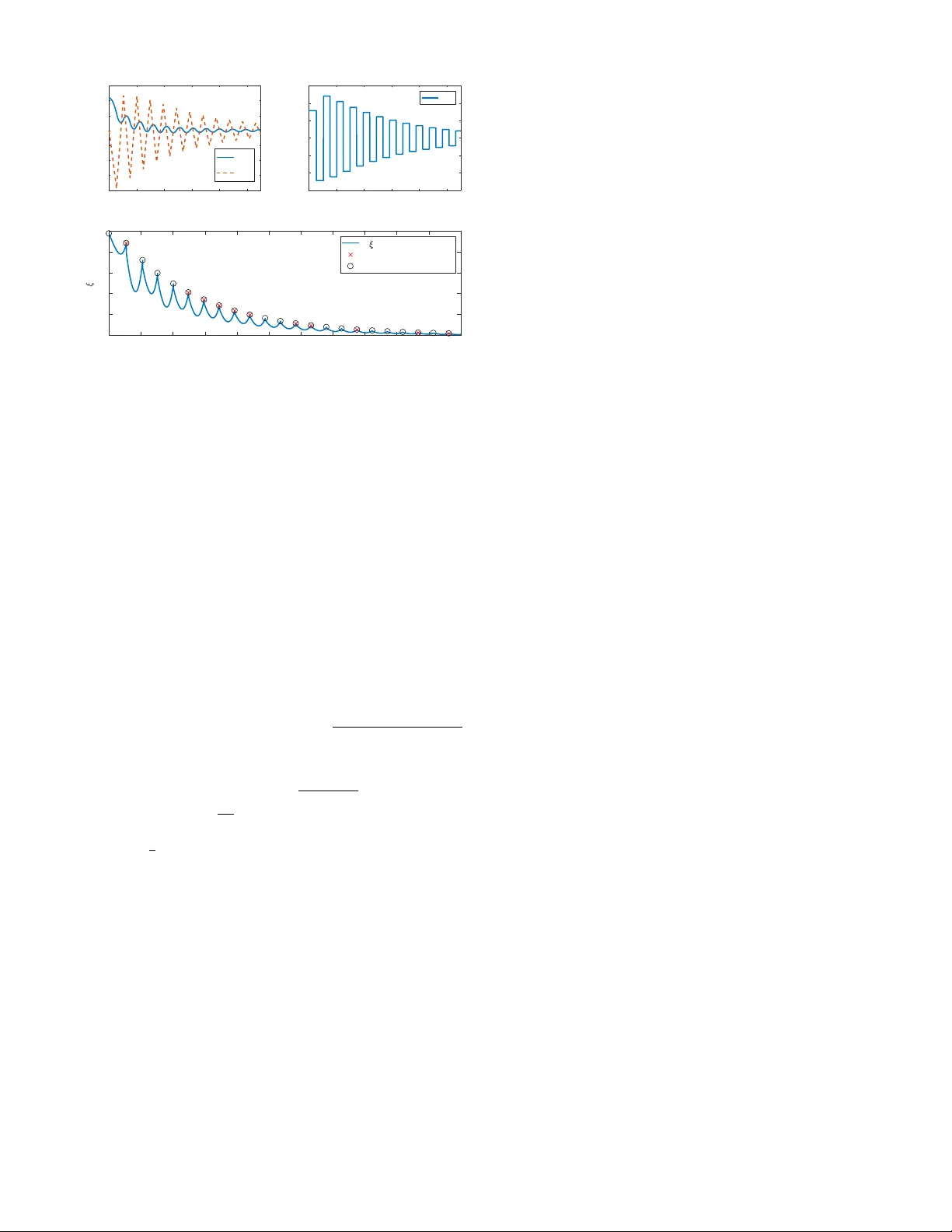
논문은 먼저 시스템 모델을 정의한다. 비선형 시스템 ˙x = f(x,u)와 피드백 법칙 u = κ(ĥx) 를 가정하고, 전송 시점 τk에서 상태 정보를 수신한 후 ĥx를 갱신한다. 전송이 없을 경우에는 예측 동역학 ˙ĥx = f_e(ĥx) 로 상태를 추정한다(Zero‑Order‑Hold는 f_e≡0). 시스템 전체는 연속‑이산 혼합 형태의 DDS(4) 로 표현된다.
핵심 가정은 연속시간 시스템에 대해 이미 알려진 안정화 피드백 κ와 라야푸노프 함수 Vγ가 존재한다는 것이다(Assumption 1). Vγ는 클래스 K 함수 α1,α2 로 양쪽을 잡히며, 라야푸노프 감소 조건 V̇ ≤ –γ(Vγ) 를 만족한다. 이러한 라야푸노프 함수는 비단조 라야푸노프 이론을 적용하기 위한 기반이 된다.
다음으로 네트워크 모델을 설정한다. 패킷 손실이 연속적으로 m번 이하로 제한된다는 가정(Assumption 2) 하에, 전송 성공 여부를 확인할 수 있는 ACK 메커니즘을 전제로 한다. PETC 트리거는 고정된 샘플링 간격 h에서만 평가되며, 트리거 규칙이 위반될 경우 상태를 전송한다.
수렴 기준은 기존 연속시간 기준 d/dt Vγ ≤ –σ γ(Vγ) (σ∈(0,1)) 를 평균 형태로 변형한다. 구체적으로 Vγ(x(t+(m+1)h)) ≤ S(t,x₀) 를 요구한다(9). 여기서 S(t,x₀)는 (7)의 최악 경우 해를 나타내며, (9)는 최대 (m+1)h 만큼의 지연을 허용하면서도 동일한 평균 수렴률 σ를 보장한다.
논문은 세 부분으로 구성된 이론적 기반을 제시한다. 첫째, 비단조 라야푸노프 함수를 이용한 안정성 정리(Prop 1,2)를 제시한다. 이 정리는 전송 시점 사이의 라야푸노프 값이 이전 전송 시점의 값보다 커지지 않으며, 전송 시점에서 평균 감소율이 일정 조건을 만족하면 DDS는 전역 asymptotic stability를 갖는다는 것을 보인다.
둘째, 수렴 기준(9)을 검증하기 위한 충분조건(Prop 3)을 제시한다. 이는 S(t,x₀)의 명시적 형태를 알 필요 없이 두 시점의 라야푸노프 값 사이에 간단한 부등식 C₁ ≤ C₂ – r σγ(C₂) 를 만족하면 (9)가 성립한다는 내용이다.
셋째, σ‑MASP(최대 허용 샘플링 주기) 하한을 계산하기 위한 시간‑의존 상한 M_c(x)와 Lipschitz 상수 L₁,c, L₂,c 를 이용한 기술적 결과를 정리한다(Assumption 3‑5). 이를 통해 기존 연구
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기