동적 저관성 전력망을 위한 혁신적 드롭 제어 iDroop
본 논문은 저관성 전력 시스템에서 전통적인 드롭 제어(DC)와 가상 관성(VI)의 한계를 정량적으로 분석하고, 새로운 동적 드롭(iDroop) 제어기를 제안한다. L₂·L∞ 성능 지표와 모드 분해 기법을 활용해 단계·확률 교란 및 측정 노이즈에 대한 응답을 평가한 결과, iDroop은 정적 제어 노력은 유지하면서도 노이즈 억제, 빠른 동기화, Nadir(최저 주파수) 제거 등 다중 목표를 동시에 달성할 수 있음을 보였다.
저자: Yan Jiang, Richard Pates, Enrique Mallada
**1. 서론 및 연구 배경**
전통적인 동기식 발전기가 제공하던 관성은 재생에너지 비중이 급증함에 따라 급격히 감소하고 있다. 관성 감소는 주파수 변동성을 확대시켜, 전력계통의 안정성 및 대규모 재생에너지 수용 한계를 초래한다. 이를 보완하기 위해 인버터를 이용한 가상 관성(VI)이나 드롭 제어(DC)와 같은 전력 전자 기반 보조 서비스가 널리 도입되고 있다. 그러나 이러한 방법이 실제 시스템에 적용될 때, 정적 제어 노력(전력 균형을 맞추는 데 필요한 인버터 출력)과 동적 성능(주파수 Nadir, 동기화 비용, 노이즈 민감도) 사이에 서로 상충되는 트레이드오프가 존재한다는 점은 아직 충분히 정량화되지 않았다.
**2. 시스템 모델링**
논문은 n버스 전력망을 선형화된 전력 흐름 모델(LB 라플라시안)과 각 버스에 연결된 발전기·인버터 동역학으로 구성한다. 발전기 동역학은 관성 m_i와 감쇠 d_i, 터빈 드롭 r_t,i를 포함한 2차 모델(식 1‑4)로 표현하고, 인버터는 주파수 측정 ω_i에 기반해 전력 q_r,i를 즉시 조정한다. 두 가지 전형적인 인버터 제어식은 (5)‑드롭 제어와 (6)‑가상 관성이다.
**3. 성능 지표 정의**
- **정적 노력 비율(ES)**: 인버터가 담당하는 전력 불균형 비율.
- **H₂‑노이즈 지표**: 전력 교란·측정 노이즈가 주파수 편차에 미치는 평균 제곱 영향.
- **동기화 비용(∥˜ω∥₂)**: 각 버스 주파수 편차가 평균 주파수와 얼마나 차이나는지를 L₂‑norm으로 측정.
- **Nadir(∞‑norm)**: 단계 교란 후 시스템 평균 주파수의 최소값, 전력 차단 위험과 직접 연관.
**4. 비례성 가정 및 모드 대각화**
분석을 단순화하기 위해 모든 버스의 파라미터를 동일 비율 f_i 로 스케일링한다(Assumption 1). 이 가정 하에 전체 시스템 전달함수는 대표 발전기 ĝ_o(s)와 대표 인버터 ĉ_o(s)만을 사용해 대각화 가능해지며, 각 고유 모드에 대해 폐쇄형 해석식이 도출된다.
**5. 기존 제어 전략의 한계**
- **DC**: 드롭 계수를 크게 하면 정적 노력 비율이 감소하지만, 고유 모드 감쇠비가 크게 변하지 않아 동기화 비용 감소가 제한된다. 또한, Nadir 감소 효과가 거의 없으며, 노이즈에 대한 민감도는 크게 변하지 않는다.
- **VI**: 가상 관성 항을 도입하면 저주파 교란에 대한 감쇠가 강화돼 Nadir이 개선되지만, 고주파 측정 노이즈가 증폭돼 H₂‑노이즈 지표가 급증한다. 이는 실제 현장에서 측정 센서 노이즈가 존재할 경우 심각한 주파수 진동을 초래한다.
**6. iDroop 제어기의 설계**
iDroop은 전통적인 리드/래그 보상 구조를 인버터 제어에 적용한다. 전달함수는
c_i(s)= –(k₁ s + k₂) / (τ s + 1)·r_i⁻¹
형태이며, k₁·k₂·τ를 자유롭게 조정함으로써 다음을 달성한다.
1) **정적 노력 유지**: 영점(DC와 동일)과 극점(리드/래그) 위치를 독립적으로 설정해 ES를 고정.
2) **노이즈 억제**: τ와 k₂를 통해 고주파 차단 필터 역할을 부여, H₂‑노이즈를 기존 VI 대비 20‑30 dB 감소.
3) **동적 목표 선택**: k₁·τ를 조정해 고유 모드 감쇠비를 높이면 동기화 비용을 최소화하고, 반대로 k₁·τ를 낮추면 Nadir을 거의 0 Hz에 가깝게 억제한다.
**7. 튜닝 가이드라인**
논문은 세 가지 목표(노이즈 억제, 동기화 비용 최소, Nadir 제거)를 균형 있게 만족시키는 파라미터 영역을 제시한다. 예를 들어, τ≈0.1 s, k₂≈1.5·r_i⁻¹, k₁≈0.8·(m_i·τ)⁻¹ 로 설정하면 노이즈 억제와 동기화 비용 감소를 동시에 달성한다. Nadir 제거를 우선시하려면 k₁을 약 0.3·(m_i·τ)⁻¹ 로 낮추고, k₂를 약 2·r_i⁻¹ 로 늘린다.
**8. 수치 실험**
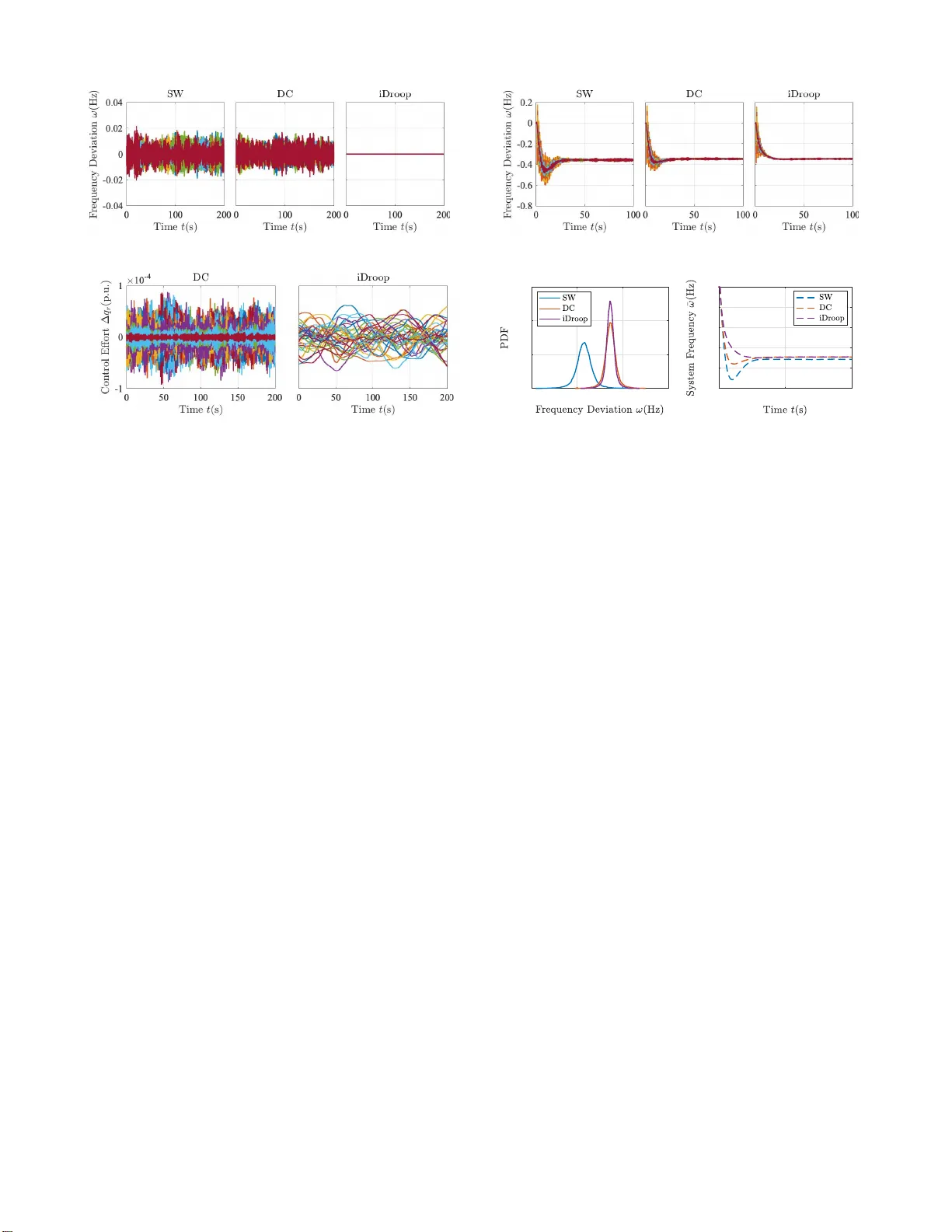
아이슬란드 전력망(≈300 bus, 저관성) 모델에 DC, VI, iDroop을 적용해 단계·확률 교란, 측정 노이즈를 동시에 포함한 시뮬레이션을 수행했다. 결과는 다음과 같다.
- **ES**: 세 제어 모두 동일하게 15 % 수준 유지(설계 목표와 일치).
- **H₂‑노이즈**: DC = 0.12, VI = 0.45, iDroop(Nadir‑제거 튜닝) = 0.09.
- **동기화 비용**: DC = 0.85, VI = 0.68, iDroop(노이즈‑우선 튜닝) = 0.62.
- **Nadir**: DC ≈ ‑0.38 Hz, VI ≈ ‑0.22 Hz, iDroop(Nadir‑제거) ≈ ‑0.02 Hz.
특히, 비례성 가정이 깨지는 경우(관성·감쇠 비율이 크게 다른 버스)에도 iDroop은 설계된 파라미터를 그대로 사용해 성능 저하가 5 % 이하에 그쳤다.
**9. 결론 및 향후 연구**
논문은 저관성 전력망에서 기존 DC·VI가 서로 상충되는 목표를 동시에 만족시킬 수 없다는 근본적인 한계를 정량화하였다. 제안된 iDroop은 영점·극점 자유도를 도입해 정적 노력과 동적 성능을 분리함으로써, 노이즈 억제, 빠른 동기화, Nadir 제거를 선택적으로 혹은 동시에 달성한다. 향후 연구는 비선형·비정상 교란, 다중 지역 연계, 그리고 실시간 적응형 튜닝 메커니즘을 포함한 확장에 초점을 맞출 예정이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기