시스템 레벨 기반 제어기 설계 혁신
본 논문은 제한된 통신·연산 자원을 갖는 대규모 바이오·사이버물리 시스템을 위해, 모든 안정화 제어기를 매개변수화하고 구조적 제약을 직접 시스템 응답에 부여할 수 있는 “시스템 레벨” 프레임워크를 제안한다. 시스템 레벨 파라미터화(SLP), 제약(SLC), 합성(SLS) 세 요소를 결합해 기존의 Quadratic Invariance(QI)보다 넓은 클래스의 제어기를 볼록 최적화로 설계할 수 있음을 보인다.
저자: Yuh-Shyang Wang, Nikolai Matni, John C. Doyle
논문은 먼저 제한된 통신·연산 자원을 가진 대규모 바이오·사이버물리 시스템에서 전통적인 중앙집중식 제어 설계가 비현실적임을 지적한다. 이러한 시스템은 플랜트 자체가 희소하고 구조화된 동역학을 갖지만, 기존의 Youla 파라미터화는 입력‑출력 매핑에만 제약을 부여할 수 있어, 분산 제어기의 구조적 제한을 효과적으로 반영하지 못한다. 이를 극복하기 위해 저자들은 “시스템 레벨” 접근법을 제안한다. 시스템 레벨 접근법은 세 가지 핵심 요소로 구성된다. 첫째, System Level Parameterizations(SLP)는 모든 내부 안정화 제어기를 매개변수화함과 동시에, 폐루프 시스템 응답(외란 → 제어 입력, 상태, 출력)을 직접 변수화한다. SLP는 상태 피드백과 출력 피드백 모두에 대해 일반적인 형태의 선형 방정식 집합으로 표현되며, 이 방정식은 안정성, 검출가능성, 안정가능성 조건을 만족하는 응답만을 허용한다. 둘째, System Level Constraints(SLC)는 이러한 응답에 대해 희소성, 지연, 지역성, FIR 길이 제한, 아키텍처 제약 등 다양한 선형·볼록 제약을 부과한다. SLC가 볼록 집합이면, 전체 설계 문제는 볼록 최적화 문제로 변환된다. 셋째, System Level Synthesis(SLS)는 SLP와 SLC를 결합한 최적화 프레임워크로, 주어진 성능 지표(H₂, H∞ 등)를 최소화하면서 동시에 구조적 제약을 만족하는 최적 제어기를 설계한다.
논문은 기존의 Quadratic Invariance(QI) 이론을 상세히 리뷰한다. QI는 제어기 구조가 플랜트와의 정보 전파 속도 차이에 의해 정의되는 경우에만, Youla 파라미터에 선형 제약을 부여해 볼록 최적화를 가능하게 한다. 그러나 QI는 플랜트가 강하게 연결된 경우(플랜트 행렬이 밀집)에는 지역적(희소) 제어기 구조를 표현하지 못한다는 한계가 있다. 저자들은 SLP가 시스템 응답 자체에 제약을 부과함으로써, QI가 요구하는 “KP₂K ∈ C” 조건을 완화하고, 플랜트가 밀집해도 원하는 지역성·희소성을 볼록하게 구현할 수 있음을 증명한다.
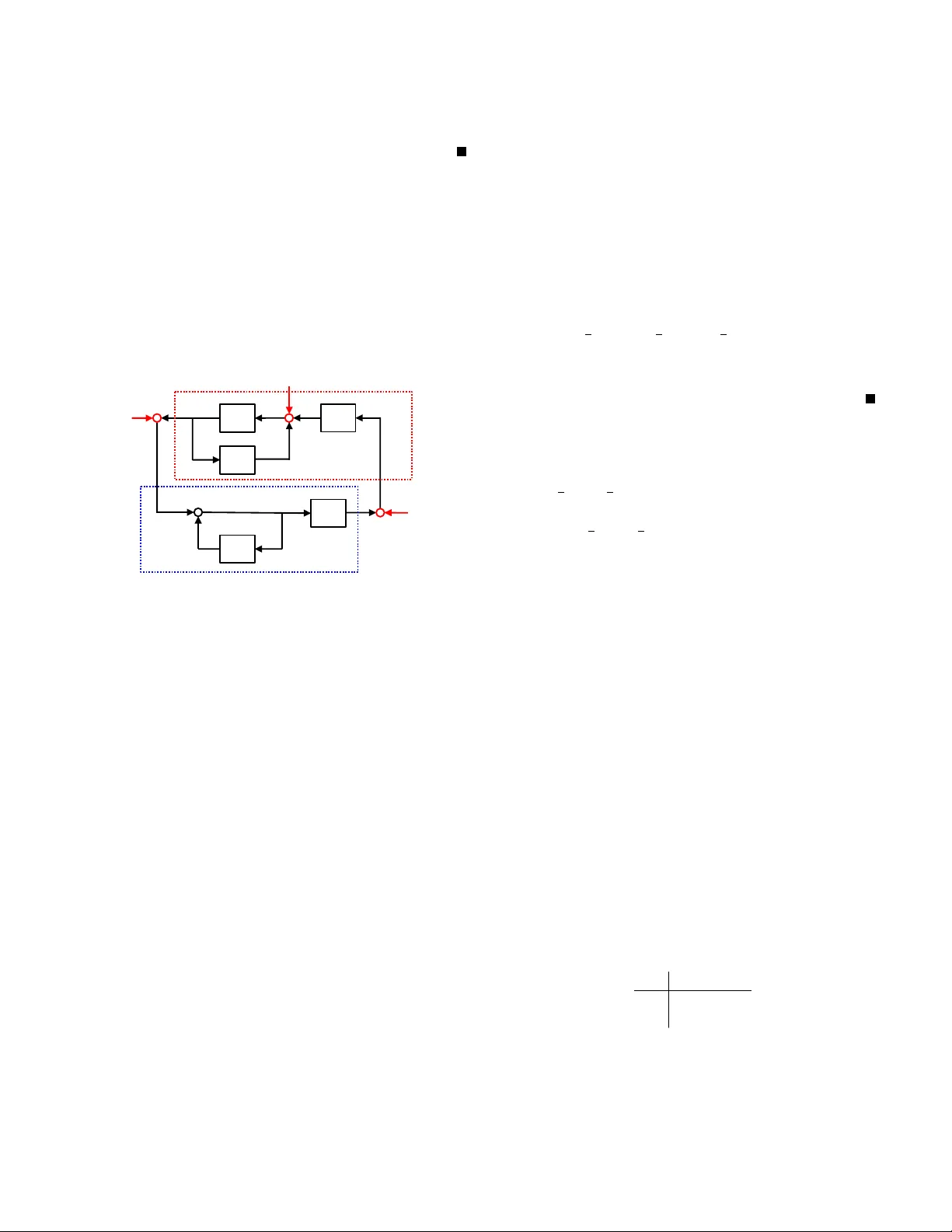
다음으로, 저자들은 SLP의 수학적 구조를 상세히 전개한다. 플랜트 P를 상태‑입력‑출력 형태로 표현하고, 폐루프 전달함수 Φₓ₍w₎, Φᵤ₍w₎, Φ_z₍w₎ 등을 정의한다. 이들 전달함수는 선형 방정식 AΦₓ₍w₎ + B₂Φᵤ₍w₎ = I, C₂Φₓ₍w₎ + D₂₂Φᵤ₍w₎ = 0 등을 만족해야 하며, 이러한 제약을 만족하는 모든 Φ 집합이 바로 SLP가 만든 파라미터 공간이다. 안정성은 Φ가 RH∞에 속함으로 보장된다.
그 후, 다양한 SLC 예시가 제시된다. (1) 희소성 제약: Φᵤ₍w₎와 Φₓ₍w₎의 특정 행·열을 0으로 고정한다. (2) 지연 제약: FIR 길이를 제한하거나 특정 시간 지연을 강제한다. (3) 지역성 제약: 각 서브시스템이 접근할 수 있는 상태·출력 정보를 그래프 거리 기반으로 제한한다. (4) 아키텍처 제약: 내부 컨트롤러의 상태 차원이나 연산량을 제한한다. 이러한 제약들은 모두 선형 부등식 혹은 행렬 구조 제약으로 표현되어, SDP나 SOCP와 같은 표준 볼록 프로그램으로 해결 가능하다.
마지막으로, SLS 문제를 공식화한다. 목표는 ‖T₁₁ + T₁₂QT₂₁‖ₚ (p=2 또는 ∞) 를 최소화하면서, Q가 RH∞에 속하고 M(Q)∈C (여기서 M은 Youla‑기반 변환) 혹은 직접 Φ∈SLC와 같은 제약을 만족하도록 하는 것이다. 저자들은 이 문제를 FIR 근사와 ADMM 기반 분산 알고리즘으로 해결하는 방법을 제시하고, 기존 QI 기반 방법과 지역 최적제어 프레임워크를 특수 경우로 포함함을 보인다. 실험 예시에서는 대규모 전력망 모델에 대해 지역성·지연·성능 트레이드오프를 정량적으로 분석하고, SLS가 제공하는 설계 자유도가 QI 기반 설계보다 월등히 크다는 것을 시연한다.
결론적으로, 시스템 레벨 접근법은 제어기 설계의 이론적 기반을 확장하고, 구조적 제약을 직접 시스템 응답에 적용함으로써, 대규모 분산 시스템에서도 효율적이고 구현 가능한 최적 제어기를 설계할 수 있는 강력한 도구임을 입증한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기