칼만 필터링 입문: 원리와 응용을 한눈에
칼만 필터링의 기본 개념을 확률·미적분 수준에서 직관적으로 설명하고, 스칼라·벡터 추정값을 최적 융합하는 방법을 정리한다. 이후 선형 시스템의 상태 추정에 적용하는 절차를 제시하며, 비선형 확장에 대한 간략한 고찰도 포함한다.
저자: Yan Pei, Swarnendu Biswas, Donald S. Fussell
본 논문은 칼만 필터링을 처음 접하는 독자를 위해 추정값 결합의 기본 원리를 확률·미적분 수준에서 설명하고, 이를 선형 시스템 상태 추정에 적용하는 과정을 단계별로 제시한다.
첫 번째 섹션에서는 칼만 필터링의 역사와 다양한 응용 분야를 소개하고, 기존 문헌이 특정 애플리케이션에 초점을 맞추어 일반 원리를 파악하기 어렵다는 점을 지적한다. 이어서 “추정값”을 측정값과 추정값 모두를 포함하는 개념으로 정의하고, 장치마다 확률 변수 xᵢ ~ pᵢ(μᵢ,σᵢ²) 로 모델링한다. 평균은 시스템적 편향을, 분산은 무작위 잡음을 나타낸다. 장치 간 비상관성(공분산 0)은 서로 독립적일 필요는 없지만, 서로의 평균에 영향을 주지 않는다는 의미로 설명한다.
두 번째 섹션에서는 스칼라 추정값의 최적 융합을 다룬다. 두 추정값 x₁, x₂ 에 대해 가중합 y = (1‑α)x₁ + αx₂ 를 고려하고, α+ (1‑α)=1 이라는 보존 조건 하에 분산 σ²_y(α) = (1‑α)²σ₁² + α²σ₂² 를 최소화한다. 미분을 통해 α* = σ₁²/(σ₁²+σ₂²) 를 얻으며, 이는 전통적인 칼만 이득 K와 동일하다. 이를 정밀도 νᵢ = 1/σᵢ² 로 표현하면 y = (ν₁x₁ + ν₂x₂)/(ν₁+ν₂) , ν_y = ν₁+ν₂ 가 된다. 즉, 더 신뢰도 높은 추정값에 더 큰 가중치를 부여한다는 직관적 해석이 가능하다.
세 번째 섹션에서는 n개의 스칼라 추정값을 일반화한다. 라그랑주 승수를 이용해 가중치 αᵢ 가 σᵢ² 의 역수 비율임을 증명하고, 최종 분산은 1/∑(1/σᵢ²) 가 된다. 동일한 정밀도 표현을 사용하면 y = ∑(νᵢxᵢ)/∑νᵢ, ν_y = ∑νᵢ 가 된다. 또한, 이 과정을 순차적으로 수행해도 최종 결과가 동일함을 보이며, 실시간 시스템에서 메모리와 연산을 절감할 수 있음을 강조한다.
네 번째 섹션은 벡터 추정값으로 확장한다. 각 추정값 xᵢ ∈ ℝ^m 에 선형 변환 Aᵢ 를 적용해 y = ∑Aᵢxᵢ 로 정의하고, 평균과 공분산은 각각 ∑Aᵢμᵢ, ∑AᵢΣᵢAᵢᵀ 가 된다. 비상관성 가정은 교차공분산이 0임을 의미한다. 정밀도 행렬 Λᵢ = Σᵢ⁻¹ 을 사용하면 가중합이 더욱 직관적으로 표현된다.
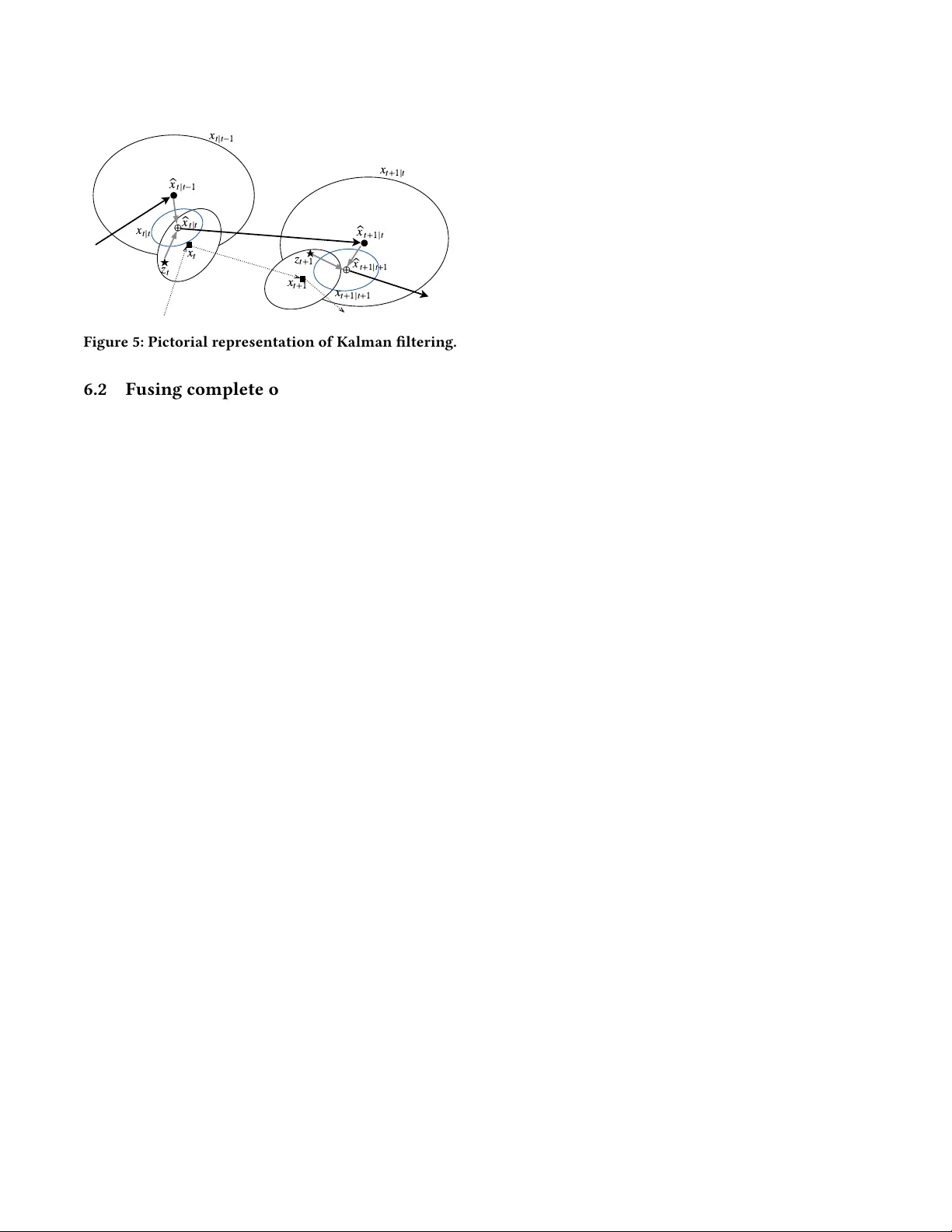
다섯 번째 섹션에서는 **부분 관측** 문제를 다룬다. 상태 벡터 x =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기