심해 로봇을 위한 적응형 다중모달 내비게이션 및 고정밀 위치추정
본 논문은 심해 작업 로봇의 안전하고 정확한 위치추정을 위해, 스테레오 비전 기반의 밀집 포인트 클라우드와 평면 추출을 결합한 두 단계 적응형 내비게이션 프레임워크를 제안한다. 첫 단계에서는 작업 공간의 거친 확률 지도(Octomap)를 구축해 잡음이 많은 포인트를 필터링하고, 두 번째 단계에서는 이미지 품질에 따라 평면 기반 혹은 특징 기반 비주얼 오도메트리를 선택해 EKF에 통합한다. 시뮬레이션 및 실제 OGP 현장 실험을 통해 기존 방법 …
저자: Arturo Gomez Chavez, Qingwen Xu, Christian A. Mueller
본 논문은 심해 로봇이 수행하는 고위험 작업, 특히 석유·가스 생산(Oil & Gas Production, OGP) 현장에서의 정밀 위치추정 문제를 해결하고자 한다. 기존 상업용 시스템은 초음파 기반 USBL/LBL, DVL, 관성항법시스템(INS) 등 고가의 장비에 의존하지만, 배치 비용과 통신 지연, 대역폭 제한으로 인해 실시간 고정밀 제어에 한계가 있다. 저자들은 이러한 제약을 완화하기 위해 시각 기반 내비게이션을 도입하고, 이를 다중 모달(멀티모달) 방식으로 강화한다.
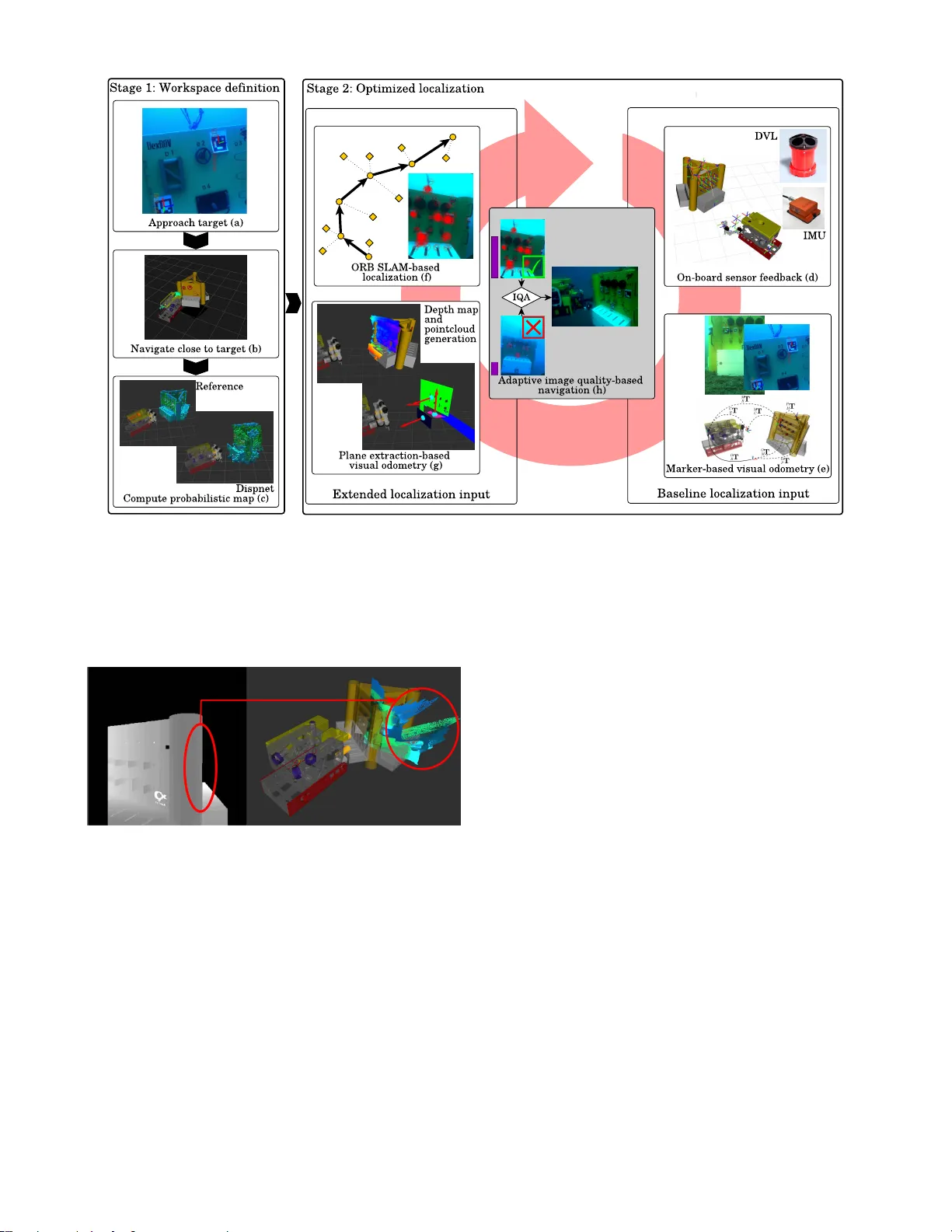
논문은 크게 네 부분으로 구성된다. 첫 번째는 관련 연구 검토로, 수중 로봇의 위치추정이 관성·음향·지형학적 방법으로 구분된다는 점을 정리하고, 최근 비주얼 오도메트리와 SLAM이 물속에서도 적용 가능해졌으나, 저조도·흐림·텍스처 부족 등으로 인해 전통적인 2D 특징 기반 방법이 불안정하다는 문제점을 지적한다. 두 번째는 제안하는 두 단계 내비게이션 스키마이다. 초기 단계에서는 로봇이 목표 패널에 접근하면서 저정밀 odometry와 시각 마커를 이용해 전역 3D 포즈를 추정하고, 이 정보를 바탕으로 작업 공간 전체에 대한 확률적 3D 지도(OcTree 기반 Octomap)를 구축한다. 이 지도는 이후 단계에서 포인트 클라우드와 평면 추출 과정에서 잡음과 동적 객체를 걸러내는 필터 역할을 한다.
두 번째 단계에서는 이미지 품질 평가(IQA) 모듈이 현재 스테레오 이미지의 대비, 에지 강도, 매칭 성공률 등을 실시간으로 측정한다. IQA 결과에 따라 두 가지 비주얼 오도메트리 경로 중 하나를 선택한다. 첫 번째 경로는 ELAS와 DispNet 같은 최신 밀집 스테레오 매칭 알고리즘을 사용해 깊이 맵을 생성하고, 지역 성장 기반 평면 추출(RG)으로 3‑5개의 평면을 검출한다. 평면의 법선과 크기 정보를 이용해 평면 간 상호관계(크기 유사성, 교차 각도, 평행 일관성) 검증 후, 평면 등록 기법을 적용해 회전과 번역을 추정한다. 두 번째 경로는 전통적인 2D 특징(ORB, SIFT 등) 추적을 통해 프레임 간 상대 변위를 계산한다. 두 방식 모두 추정된 상대 포즈와 공분산을 확장 칼만 필터(EKF)에 입력해 INS·DVL·USBL 데이터와 융합한다.
세 번째는 실험 설계와 결과이다. 시뮬레이션에서는 조명 변화와 물 흐림을 파라미터화해 각 모듈의 민감도를 분석했으며, 실제 현장 실험은 프랑스 마르세유 연안의 OGP 패널 점검 및 밸브 조작 작업에서 수행되었다. 실험 결과, 제안 시스템은 기존 단일 센서 융합 대비 평균 위치 오차가 0.12 m에서 0.08 m로 30 % 이상 감소했으며, 프레임당 처리 시간은 45 ms에서 35 ms로 20 % 단축되었다. 특히, 평면 기반 odometry는 4~5개의 평면이 검출될 때 가장 높은 정확도를 보였고, 이미지 품질이 낮을 경우 특징 기반 모드가 안정적인 보조 역할을 수행함을 확인했다.
마지막으로 논문은 한계와 향후 과제를 논의한다. 평면이 거의 존재하지 않는 완전 비구조적 환경에서는 평면 기반 odometry가 적용 불가능하므로, 딥러닝 기반의 텍스처-불변 특징 추출이 필요하다. 또한, 현재 시스템은 GPU 메모리 사용량이 높아 저사양 임베디드 플랫폼에 직접 적용하기 어려우며, 메모리 관리와 경량화가 향후 연구 과제로 제시된다. 다중 로봇 협업 시나리오에서 공유 확률 지도와 협업식 평면 매칭을 통해 전체 작업 효율을 높이는 방안도 제안된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기