점군 손실 압축을 위한 딥 오토인코더 기반 기하학 압축
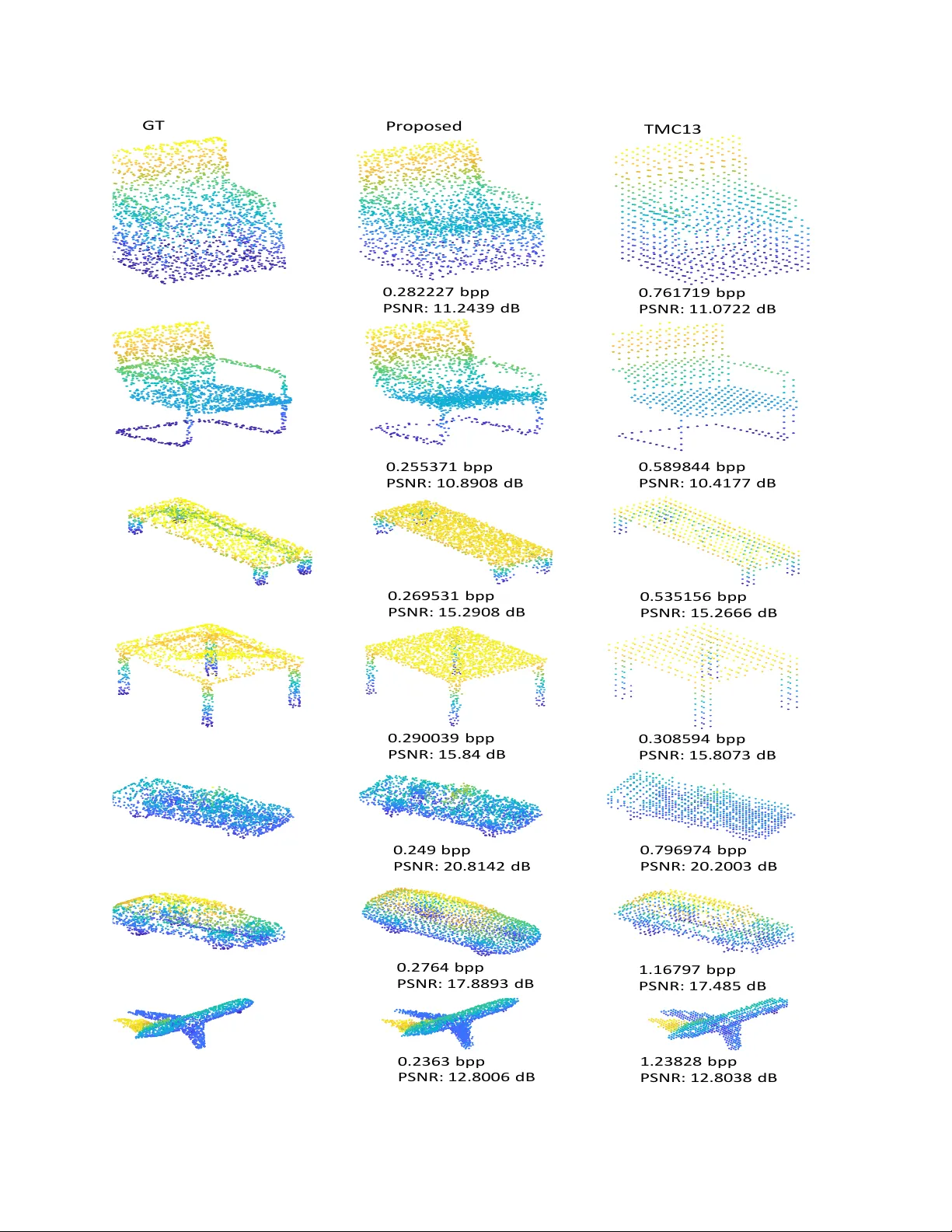
본 논문은 포인트 클라우드의 기하학 정보를 손실 압축하기 위해 PointNet 기반 인코더와 균일 양자화, 엔트로피 추정 블록, 비선형 디코더로 구성된 완전 자동인코더 구조를 제안한다. 기존의 옥트리·핸드크래프트 코덱과 달리 입력을 직접 포인트 집합으로 받아들여 학습 기반 압축을 가능하게 하며, MPEG‑3DG TMC13 대비 평균 73.15 % BD‑rate 개선을 달성하였다.
저자: Wei Yan, Yiting shao, Shan Liu
본 논문은 3차원 포인트 클라우드의 기하학 정보를 손실 압축하기 위한 새로운 프레임워크를 제안한다. 포인트 클라우드는 자율 주행, 증강 현실 등 다양한 분야에서 핵심 데이터 형식으로 사용되지만, 비정형성과 복잡성 때문에 기존 이미지·비디오 코덱을 그대로 적용하기 어렵다. 전통적인 방법은 옥트리 구조를 기반으로 한 G‑PCC와 V‑PCC가 있으며, 특히 MPEG‑3DG의 TMC13은 카테고리 1·3에 특화된 두 개의 모듈을 제공한다. 그러나 이러한 휴리스틱 기반 코덱은 특정 데이터 특성에 맞춰 설계돼 새로운 포인트 클라우드 유형에 대한 적응이 느리다.
이에 저자들은 포인트 클라우드 압축을 분석‑합성(analysis‑synthesis) 구조로 모델링하고, 완전 자동인코더(auto‑encoder)를 핵심 압축 엔진으로 채택한다. 전체 아키텍처는 네 개의 모듈로 구성된다: (1) 샘플링 레이어, (2) PointNet 기반 인코더, (3) 균일 양자화 및 엔트로피 추정 블록, (4) 비선형 합성(디코더) 변환 모듈.
샘플링 레이어는 G‑PCC에서 영감을 받아 iterative farthest point sampling(FPS)을 사용해 입력 포인트(2048점)를 균일하게 다운샘플링한다. 이는 형태 보존에 유리하면서도 연산량을 감소시킨다. 인코더는 PointNet 구조를 차용해 1‑D 컨볼루션(채널 64‑128‑128‑256‑k)과 ReLU·배치 정규화를 연속 적용하고, 전역 최대 풀링을 통해 순열 불변성을 확보한다. 이렇게 얻어진 k‑차원 잠재 벡터는 양자화 단계로 넘어가며, 저자는 두 가지 양자화 방법을 비교한다. 라운딩 함수의 부드러운 근사와 균일 잡음 추가 방식 중, 역전파 시 미분 가능성을 유지하면서도 실제 압축 성능에 큰 차이가 없음을 확인하고, 최종 구현에서는 균일 잡음(
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기