인공 갈색긴귀박쥐 귀를 이용한 고정밀 목표 고도 추정 기술
본 연구는 갈색긴귀박쥐(Plecotus auritus)의 귀 형태를 3D 프린팅한 인공 핀나와 초음파 스피커·마이크를 결합한 바이노럴 소나 시스템을 구축하고, 회귀형 인공신경망과 슬라이딩 윈도우 평균 알고리즘을 이용해 목표물의 고도( elevation)를 5° 이하 오차로 추정한다. 핀나를 평행하게 배치했을 때 고도 추정 정확도가 높으며, 핀나를 직각으로 배치하면 고도와 방위(azimuth) 두 축을 동시에 추정할 수 있음을 보였다. FEM·K…
저자: Sen Zhang, Xin Ma, Hongwang Lu
**연구 배경 및 목적**
모바일 로봇과 무인 항공기의 센서 요구가 증가함에 따라 어두운 환경이나 연기 등 시각 센서가 제한되는 상황에서 초음파 기반 탐지가 주목받고 있다. 박쥐는 복잡한 어두운 환경에서도 고해상도의 3차원 정보를 얻어 비행한다는 점에서 영감을 주었지만, 기존 인공 시스템은 주로 마이크 배열을 이용한 시간 차이(ITD) 기반 방위 추정에 머물렀으며, 고도(elevation) 정보를 효과적으로 활용하지 못했다. 특히, 갈색긴귀박쥐(Plecotus auritus)의 귀는 주파수에 따라 측면 로브가 고도 방향으로 선형 스캔되는 독특한 구조를 가지고 있어 고도 정보를 자연스럽게 인코딩한다는 선행 연구가 있다. 본 논문은 이러한 생물학적 특성을 정량화하고, 3D 프린팅으로 만든 인공 핀나와 초음파 송·수신 장치를 이용해 고도와 방위를 동시에 추정하는 바이노럴 소나 시스템을 구현하는 것을 목표로 한다.
**시뮬레이션 및 구조 설계**
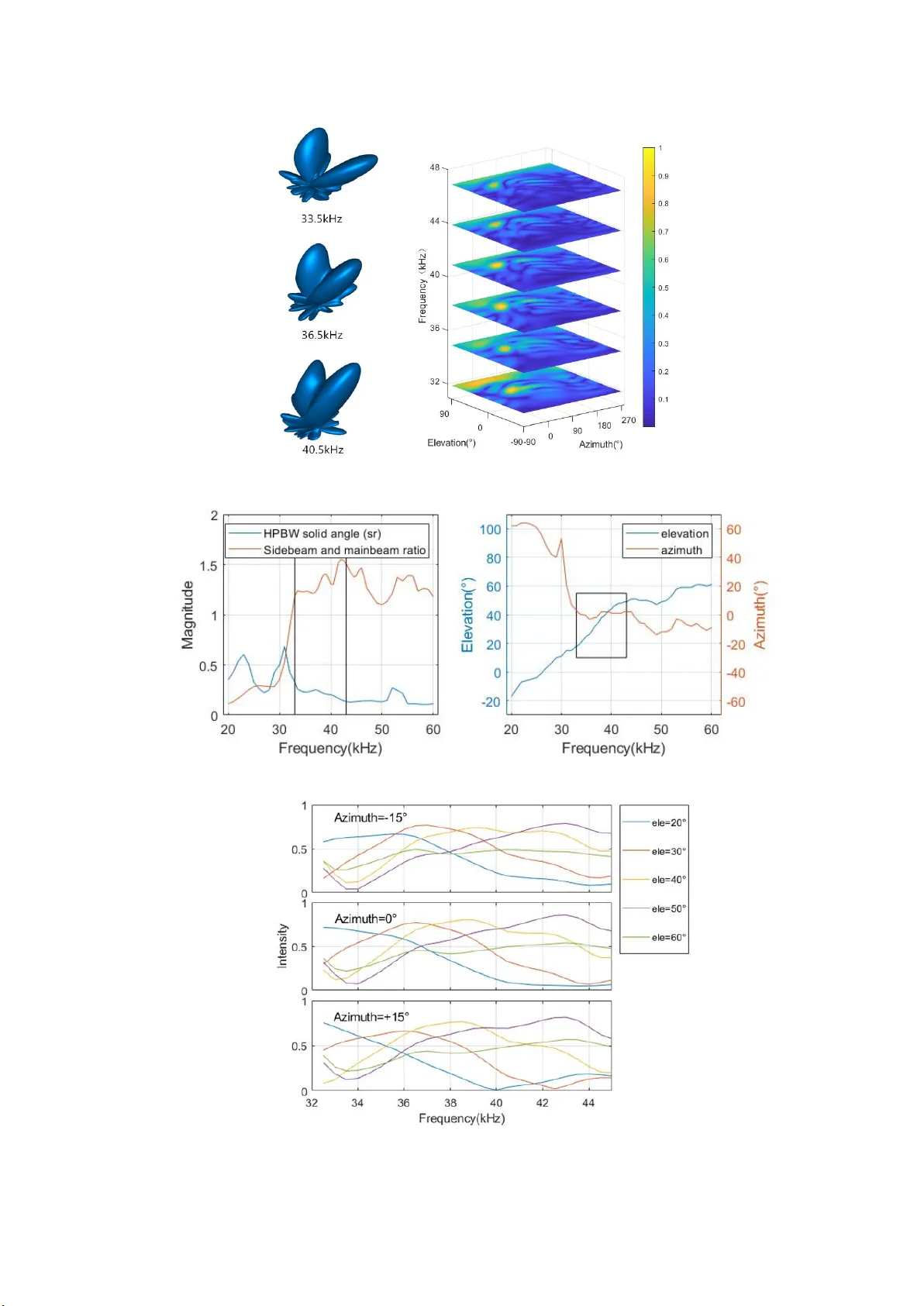
유한요소법(FEM)과 Kirchhoff 적분을 활용해 22–56 kHz 주파수 대역에서 갈색긴귀박쥐 귀의 방사 패턴을 계산하였다. 결과는 30 kHz 이상에서 첫 번째 측면 로브가 고도 방향으로 거의 선형적으로 이동하고, 방위(azimuth) 변화에 대해서는 거의 일정함을 보여준다. 반파폭(HPBW)은 주파수에 따라 변동하지만, 30 kHz 이하에서는 로브가 넓고 에너지 집중도가 낮아 고도 해상도가 떨어진다. 이러한 특성을 바탕으로, 실제 귀와 동일한 형태의 인공 핀나를 3D 프린팅하고, 각 핀나 뿌리부에 초음파 마이크를 부착하였다. 초음파 스피커는 5 ms 길이의 Linear FM chirp(5–20 kHz) 펄스를 2 s 간격으로 방출한다.
**데이터 수집 및 전처리**
실험은 1.0–2.0 m 거리의 작은 구형 목표물을 대상으로, 방위 –90°~90°(7° 간격)와 고도 20°~55°(5° 간격) 등 다양한 조합에서 에코를 수집하였다. 각 에코는 시간‑주파수 변환을 거쳐 주요 주파수 피크와 스펙트럼 강도를 특징 벡터로 추출한다. 전체 데이터셋은 65 600개의 펄스로 구성되며, 훈련·검증·테스트용으로 무작위 분할하였다.
**머신러닝 모델 및 알고리즘**
입력 특징을 9개의 은닉 뉴런을 가진 BP 신경망에 넣어 고도(또는 방위) 추정을 수행하였다. 모델은 10‑폴드 교차 검증을 통해 과적합을 방지하고 평균 정확도를 평가하였다. 단일 펄스 기반 추정에서는 핀나가 평행(두 귀가 동일 방향)일 때, 방위가 0°에 가까울수록 고도 추정 정확도가 80 % 이상(±5°)에 도달했으며, 방위가 ±30°를 초과하면 정확도가 약 60 %까지 감소한다. 이는 송신 안테나가 고정된 0° 방향을 유지하면서 고도‑주파수 상관관계는 유지되지만, 방위가 멀어질수록 SNR이 감소하기 때문이다.
**펄스 트레인 및 슬라이딩 윈도우 평균**
실제 박쥐가 연속적인 에코를 통합하는 방식을 모방해, 3~20개의 펄스로 구성된 펄스 트레인을 사용하고, “moving window accumulation” 알고리즘으로 각 펄스의 추정값을 평균하였다. 펄스 수가 증가할수록 오차가 감소했으며, 20펄스 트레인에서는 ±3° 오차 범위 내 정확도가 95 %에 달했다. 이는 다중 에코를 통합함으로써 잡음에 대한 강인성을 크게 향상시킨 결과이다.
**직각 핀나 배치와 3차원 추정**
핀이 90°로 배치된 경우, 두 귀가 서로 직교하는 평면에서 각각 고도 정보를 제공한다. 동일한 BP 신경망을 방위와 고도 각각에 적용하고, 슬라이딩 윈도우 평균을 적용하면 방위와 고도를 동시에 추정할 수 있었다. 무작위 방위·고도 조합에서도 평균 오차가 ±5° 이하로 유지되었으며, 특히 방위가 0° 근처일 때 오차가 최소화되는 경향을 보였다.
**결과 요약 및 의의**
1. **고도 추정**: 평행 핀나 배치와 단일 펄스만으로도 80 % 이상의 정확도(±5°)를 달성, 다중 펄스와 평균화로 95 %(±3°)까지 향상.
2. **방위·고도 동시 추정**: 직각 핀나 배치와 머신러닝 결합으로 3차원 위치 추정 가능, 기존 ITD 기반 2D 방법 대비 하드웨어 복잡도 감소.
3. **생체모방 설계 검증**: FEM·Kirchhoff 시뮬레이션 결과와 실험 결과가 일치, 박쥐 귀의 주파수‑고도 스캔 메커니즘이 인공 시스템에 그대로 적용 가능함을 입증.
**제한점 및 향후 연구**
- 실험은 정적 실내 환경에서 수행되었으며, 목표물의 반사 특성이 일정했다. 실제 야외 환경이나 다양한 표면 재질에 대한 일반화 검증이 필요하다.
- 마이크와 스피커의 고주파 감도 차이로 인해 SNR이 방위가 큰 경우 감소한다. 고감도 마이크와 광대역 송신기를 활용한 하드웨어 개선이 요구된다.
- 현재는 BP 신경망을 사용했지만, CNN·RNN 등 더 복잡한 딥러닝 구조가 잡음에 더 강인할 수 있다.
**결론**
본 연구는 갈색긴귀박쥐 귀의 고유한 주파수‑고도 스캔 특성을 정량화하고, 이를 3D 프린팅 인공 핀나와 머신러닝 기반 신호 처리에 적용함으로써 3차원 목표물 위치 추정, 특히 고도 추정에서 높은 정확도와 간결한 시스템 구성을 달성하였다. 이는 로봇·드론의 어두운 환경 탐색, 장애물 회피 등에 실용적인 바이노럴 초음파 센서 기술로 활용될 가능성을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기