RF 기반 UAV 방향 탐지 딥러닝 솔루션
본 논문은 다중 안테나와 복잡한 위상 동기화·보정 없이도 단일 채널 RF 수신기로 소형 드론의 방위각을 추정할 수 있는 희소 디노이징 오토인코더(SDAE) 기반 딥 뉴럴 네트워크(DNN) 방법을 제안한다. 전력 측정값을 정규화하여 입력으로 사용하고, SDAE가 잡음에 강인한 희소 특징을 추출한 뒤, 추가적인 완전 연결층과 소프트맥스 분류기로 방위각을 8개의 클래스로 구분한다. 실험은 USRP B210 SDR과 4요소 섹터 안테나를 이용해 수행했…
저자: Samith Abeywickrama, Lahiru Jayasinghe, Hua Fu
본 논문은 소형 무인항공기(UAV)의 실시간 방위각 탐지를 위해 기존 고복잡도 방향 탐지 기법(MUSIC, ESPRIT)의 한계를 극복하고자 한다. 전통적인 방법은 다채널 수신, 정확한 위상 동기화, 안테나 보정 및 방사 패턴 모델링을 전제로 하여 하드웨어 복잡도와 전력 소모가 크게 증가한다. 특히, 상업용 드론이 사용하는 Wi‑Fi 기반 OFDM 신호는 넓은 대역폭·버스트 전송 특성으로 인해 순간적인 스냅샷을 확보하기 어려워 기존 알고리즘 적용이 제한적이다.
이에 저자들은 ‘전력 기반’ 접근법을 채택한다. N개의 방향성 안테나를 원형 배열로 배치하고, 단일 채널 SDR에 SPNT 스위치를 연결해 순차적으로 각 안테나를 활성화한다. 각 스위치 사이클 동안 측정된 수신 전력 \(P_n\)을 전체 전력 합으로 정규화한 비율 \(x_n = P_n / \sum_i P_i\) 를 구한다. 이 비율은 안테나의 방사 이득 \(G_n(\theta)\)에 따라 달라지므로, 서로 다른 방위각 \(\theta\)에 대해 고유한 패턴을 형성한다는 가정 하에 방향 추정에 활용한다.
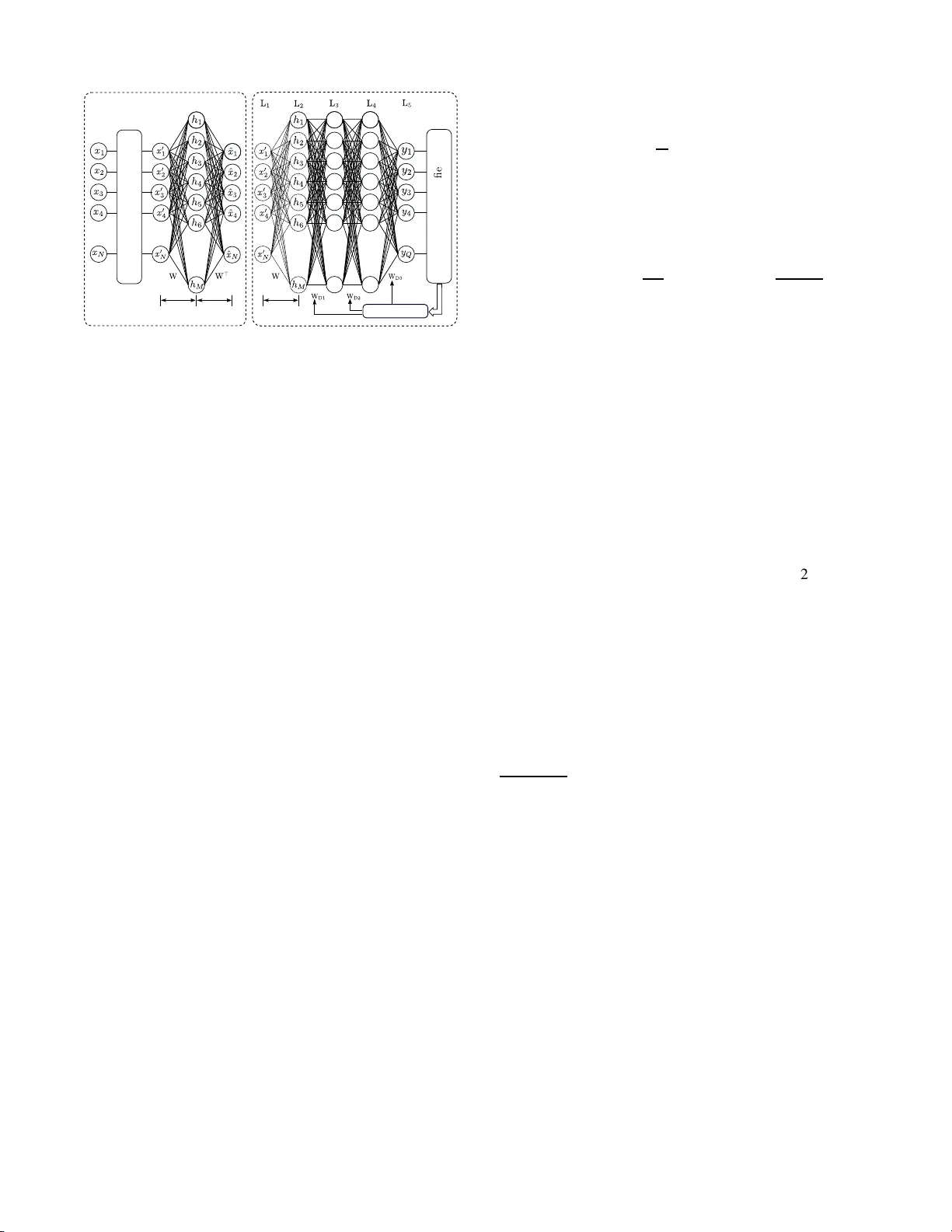
제안된 딥러닝 프레임워크는 두 단계로 구성된다. 첫 단계는 희소 디노이징 오토인코더(SDAE)이다. 입력 전력 비율 \(x\)에 잡음 추가기 \(f_c\)를 적용해 손상된 입력 \(x'\)를 만든 뒤, 인코더 가중치 \(W\)와 편향 \(b_e\)를 통해 은닉층 \(h = f(W f_c(x) + b_e)\) 를 얻는다. 디코더는 \(W^\top\)와 \(b_d\)를 사용해 복원 \(\hat{x}=f(W^\top h + b_d)\) 를 수행한다. 손실 함수는 재구성 오차와 KL 발산 기반 희소성 제약 \(\beta \sum_m KL(\rho\|\rho_m)\) 의 가중합으로 정의된다. 여기서 \(\rho\)는 목표 평균 활성도(보통 0에 가깝게 설정)이며, \(\beta\)는 재구성 정확도와 희소성 사이의 트레이드오프를 조절한다. 학습이 완료되면 디코더는 버리고 인코더 출력 \(h\)를 다음 단계에 전달한다.
두 번째 단계는 완전 연결 DNN이다. 인코더 출력 뒤에 3개의 은닉층(L2, L3, L4)과 소프트맥스 출력층을 두어 8개의 방위각 클래스를 분류한다. L2는 인코더와 동일한 활성화 함수를 사용하고, L3·L4는 ReLU를 채택한다. 입력은 여전히 잡음이 섞인 전력 비율 \(x'\)이며, 레이블은 0°, 45°, …, 315°와 같이 8개의 구역으로 정의한다. 따라서 지도 학습이 적용되며, 인코더 가중치는 고정된 채로 DNN 가중치만 업데이트된다.
실험은 USRP B210 SDR과 4요소 섹터 안테나(원형 배열)로 구성된 시스템을 사용했다. DJI Phantom 3 드론의 2.401 GHz–2.481 GHz 대역 OFDM 다운링크 신호를 수신하고, 실내외 개방형 환경에서 8개의 방위각 구역(각 45°)에 대해 데이터를 수집했다. 네트워크 구조는 입력 4노드, L2(200), L3(12), L4(12), 출력 8노드로 설정했으며, 이는 실험을 통해 경험적으로 최적화된 파라미터이다.
성능 평가는 혼동 행렬을 통해 수행되었다. SDAE‑DNN 구조는 대부분의 클래스에서 94% 이상 정확도를 달성했으며, 특히 0°와 180°와 같이 안테나 이득이 유사한 각도에서도 오분류율이 낮았다. 반면, 동일한 인코더 없이 순수 DNN만 사용한 경우 정확도가 80%대에 머물렀으며, 이는 SDAE가 잡음 억제와 희소 특징 추출에 크게 기여함을 의미한다.
논문의 주요 기여는 다음과 같다. (1) 다채널 위상 동기화·보정 없이 단일 채널 RF 수신기로 방향 탐지를 가능하게 하는 시스템 모델 제시, (2) 전력 비율을 입력으로 하는 희소 디노이징 오토인코더를 통한 잡음 강인성 및 특징 추출 방법 제안, (3) 실제 드론 신호를 이용한 실험 검증 및 코드 공개(깃허브)로 재현 가능성 확보. 한계점으로는 안테나 수가 적을 경우 이득 변동이 충분히 구분되지 않을 가능성, 방위각을 8개의 고정 구역으로만 분류한다는 점을 들 수 있다. 향후 연구에서는 안테나 배열을 확대하거나 연속적인 방위각 회귀 모델을 도입해 정밀도를 높이는 방향이 제시된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기