장벽을 넘는 소리: 회절 기반 비가시음원 위치추정
본 논문은 실내 환경에서 시야가 차단된(NLOS) 음원 위치를 추정하기 위해, 장벽 주변을 통과하는 소리의 회절 현상을 활용한 새로운 알고리즘을 제안한다. 3D 메쉬에서 회절 가능한 웨지를 사전 추출하고, Uniform Theory of Diffraction(UTD) 기반의 회절 음향 레이를 생성한 뒤, 입자 필터를 이용해 레이들의 수렴 영역을 음원 위치로 추정한다. 실험 결과 평균 0.7 m의 정확도를 달성했으며, 기존 반사‑전용 방법 대비 …
저자: Inkyu An, Doheon Lee, Jung-woo Choi
**1. 서론**
모바일 로봇이 실내에서 정확히 자신의 위치를 파악하기 위해서는 다양한 센서와 알고리즘이 필요하다. 음향 센서는 GPS가 닿지 않는 실내에서 특히 유용하지만, 기존의 TDOA 기반 직접 경로 이용 방법은 음원이 장애물에 가려져 시야가 차단될 경우(Non‑Line‑of‑Sight, NLOS) 성능이 급격히 저하된다. 저자들은 이러한 문제를 해결하고자, 소리의 회절 현상을 활용해 비가시 음원을 추정하는 새로운 프레임워크를 제안한다.
**2. 관련 연구**
음원 위치추정 분야에서는 TDOA, 딥러닝 기반 방향 추정, 그리고 반사 경로를 이용한 기하학적 음향 모델링이 주류를 이룬다. 특히 An et al.의 반사‑인식 SSL은 직접·반사 레이를 이용해 3D 위치를 추정했지만 회절을 무시한다. 물리 기반 음향 시뮬레이션에서는 Uniform Theory of Diffraction(UTD)와 Biot‑Tostoy‑Medwin(BTM) 모델이 회절을 다루지만, BTM은 계산량이 커 실시간 적용이 어렵다. 본 논문은 UTD를 기반으로 실시간 회절 레이를 생성하고, 이를 기존 반사‑인식 프레임워크에 통합한다.
**3. 시스템 개요**
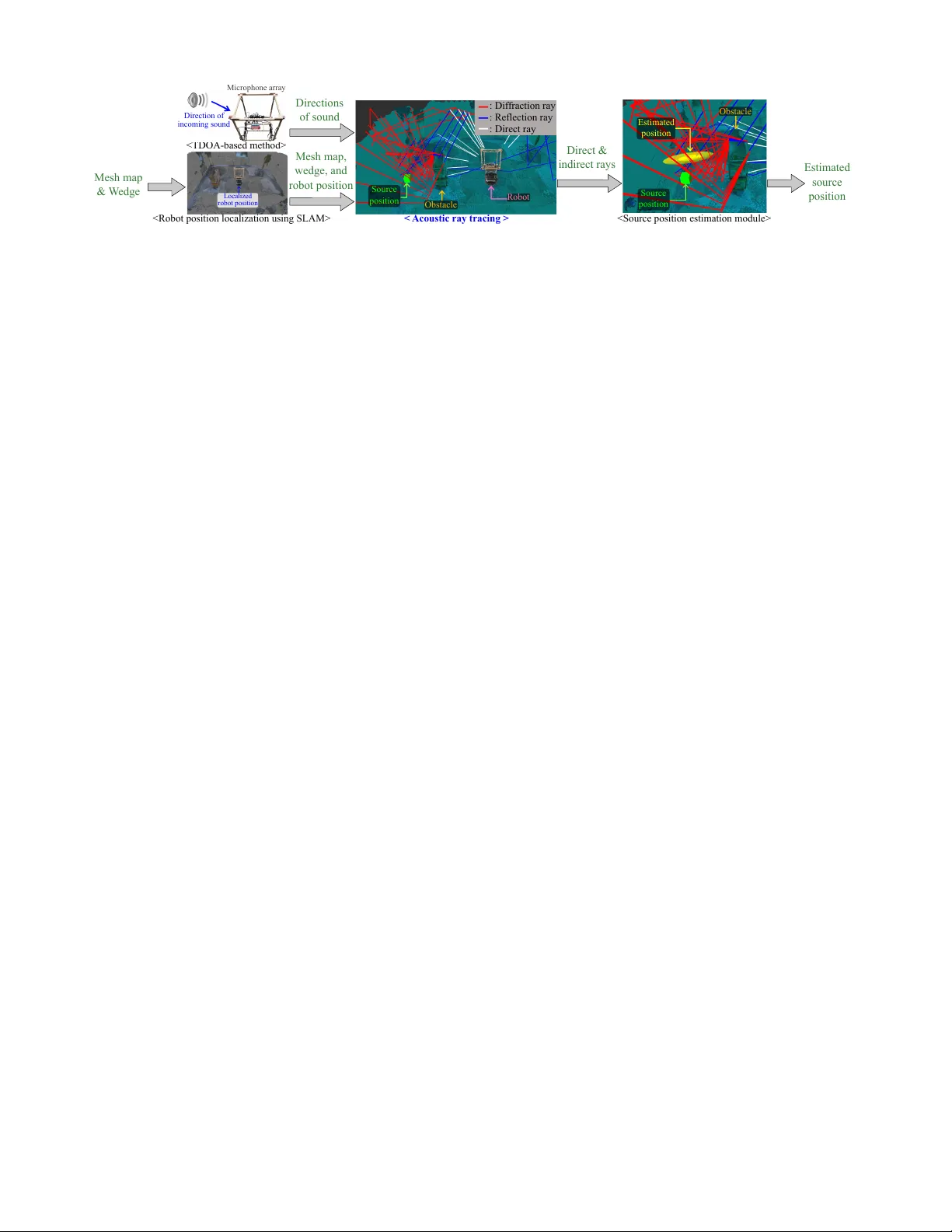
시스템은 두 단계로 구성된다.
- **사전 계산(Precomputation)**: SLAM을 이용해 레이저 스캐너와 Kinect로 실내 포인트 클라우드를 획득하고, 이를 삼각형 메쉬로 재구성한다. 메쉬에서 두 인접 삼각형 사이의 dihedral 각이 Θ_W보다 큰 에지를 ‘웨지’로 추출한다. 이 웨지는 회절 가능 영역을 정의한다.
- **실시간 실행(Runtime)**: 마이크 어레이에서 수집한 오디오 스트림을 TDOA 알고리즘에 입력해 여러 입사 방향을 얻는다. 각 방향에 대해 역방향 기본 레이를 발사하고, 레이가 메쉬와 충돌하면 반사 레이를, 웨지에 근접하면 회절 레이를 생성한다. 회절 레이는 UTD 모델에 따라 N_d개의 레이로 분산시켜, 실제 회절 파동이 올 수 있는 모든 방향을 근사한다.
**4. 회절 레이 생성 상세**
레이가 웨지에 ‘충돌’하지 않아도 회절 가능도 v_d = cos(θ_D) 를 계산한다. 여기서 θ_D는 레이와 웨지에 대한 이상적인 회절 레이 사이의 각도이며, v_d가 0.95 이상이면 회절 조건을 만족한다 판단한다. 그런 경우, 로컬 좌표계(ẑ: 웨지 축, ẋ: 두 면 사이 중간 방향, ŷ: 오른손 법칙에 따라)에서 N_d개의 단위 벡터를 생성하고, 이를 전역 좌표계로 변환한다. 이렇게 생성된 회절 레이는 다시 메쉬와 교차 검사를 수행해 추가 반사·회절을 유도한다.
**5. 음원 위치 추정**
모든 레이(직접, 반사, 회절)의 경로를 집합으로 모은 뒤, 입자 필터를 적용한다. 각 입자는 후보 음원 위치이며, 입자와 레이들의 최소 거리 합을 비용 함수로 사용한다. 비용이 낮은 입자는 높은 가중치를 얻고, 재샘플링 과정을 통해 집중된다. 최종적으로 가중치가 가장 큰 입자가 추정된 음원 위치가 된다.
**6. 실험 및 결과**
실험은 7 m × 7 m × 3 m 크기의 방에서 정적·동적 NLOS 음원을 대상으로 수행되었다. 음원은 클랩 소리와 저주파 기계음 등 다양한 스펙트럼을 가진다. 평가 지표는 추정 위치와 실제 위치 사이의 L2 거리이다. 제안 방법은 평균 0.7 m의 오차를 기록했으며, 반사‑전용 방법(오차 1.22 m~1.45 m) 대비 37 %~130 % 정확도 향상을 보였다. 특히, 음원이 완전히 가려진 구간(27 s~48 s)에서도 추정 오차가 0.95 m 이하로 유지되어 회절 모델의 효과를 입증했다.
**7. 논의**
본 접근법은 회절을 가상 음원으로 모델링함으로써 저주파 비가시 경로를 포착한다는 점에서 기존 기하학적 음향 모델보다 뛰어나다. 그러나 메쉬 품질에 크게 의존하며, 복잡한 다중 회절이나 확산 효과는 현재 모델에 포함되지 않는다. 입자 필터와 회절 레이 수(N_d)의 선택에 따라 연산량이 급증할 수 있어, 실시간 로봇 시스템에서는 하드웨어 가속이나 적응형 샘플링 전략이 필요하다.
**8. 결론 및 향후 연구**
본 논문은 UTD 기반 회절 레이와 입자 필터를 결합해 NLOS 음원 위치추정 문제를 효과적으로 해결하였다. 향후 연구에서는 BTM과 같은 고정밀 회절 모델을 실시간에 근접하게 적용하거나, 딥러닝 기반 사전 학습으로 회절 레이의 샘플링 효율을 높이는 방안을 모색할 계획이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기