내재적 등거리 매니폴드 학습과 센서 불변 위치추정
본 논문은 관측 함수가 알려지지 않은 상황에서도, 관측 데이터가 형성하는 매니폴드의 푸시‑포워드(metric) 텐서를 신경망으로 추정해 내재적 거리 구조를 복원하고, 이를 등거리(MDS 기반) 임베딩에 활용함으로써 다양한 센서 모달리티에 대해 동일한 저차원 좌표를 얻는 방법을 제시한다. 실험은 실내 이미지와 RSS 데이터를 이용한 무인 로봇 위치추정에 적용돼, 기존 비등거리 매니폴드 학습 기법보다 높은 정확도와 모달리티 독립성을 보였다.
저자: Ariel Schwartz, Ronen Talmon
본 논문은 관측 함수가 알려지지 않은 상황에서도, 고차원 관측 데이터가 내재하고 있는 저차원 매니폴드의 기하학적 구조를 정확히 복원하고 이를 등거리 임베딩으로 변환하는 새로운 매니폴드 학습 방법을 제안한다. 연구 배경은 많은 실세계 시스템이 소수의 잠재 변수에 의해 구동되지만, 이를 측정하기 위해 복잡하고 고차원적인 센서 데이터를 수집한다는 점이다. 기존의 비등거리 매니폴드 학습 기법들은 관측 데이터 자체의 기하학에 의존해 저차원 표현을 만든다. 그러나 관측 함수가 임의적이거나 비선형이면, 관측 데이터의 기하학은 잠재 시스템의 진정한 구조와 크게 달라진다. 따라서 동일한 잠재 시스템을 서로 다른 센서(예: RSS와 이미지)로 관측했을 때, 기존 방법들은 서로 다른 저차원 결과를 산출해 센서 불변성을 제공하지 못한다.
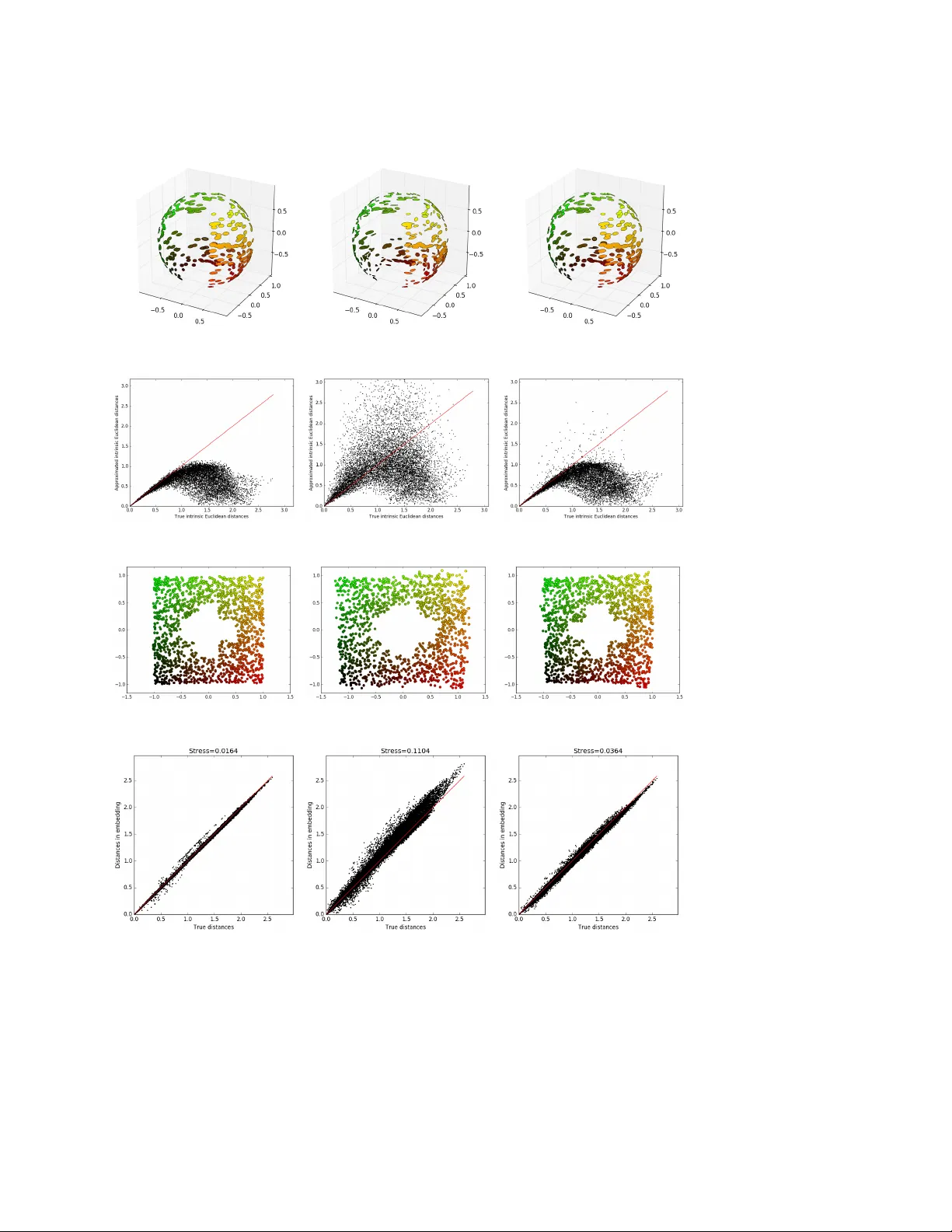
이를 해결하기 위해 저자는 두 단계의 핵심 아이디어를 제시한다. 첫 번째는 푸시‑포워드(metric) 텐서 M(y)를 이용해 관측 매니폴드 Y 위에서 내재적 거리 d_{ij} 를 근사하는 것이다. 수학적으로 M(y)=J_f(x)·J_f(x)^T 로 정의되며, 여기서 J_f는 관측 함수 f의 야코비안이다. 이 텐서는 Y와 X 사이의 등거리 관계를 보존한다. 실제로 두 점 y_i, y_j 사이의 거리 제곱은 Δy^T M(y_i) Δy 와 Δy^T M(y_j) Δy 의 평균으로 근사될 수 있다(식 4). 이 근사는 기존 연구들에서 여러 차례 검증되었으며, 오차는 고차원에서 매우 작다.
두 번째는 M(y)를 직접 알 수 없으므로, 인공신경망(ANN)을 이용해 데이터를 기반으로 M(y)를 추정하는 방법이다. 네트워크는 입력으로 관측 점 y와 그 주변 이웃 차이 Δy를 받으며, 출력으로 M(y)의 상삼각 성분을 예측한다. 학습 과정에서는 (i) 근접 이웃 사이의 실제 거리와 근사 거리 ˜d_{ij} 의 차이를 최소화하는 손실, (ii) M(y)가 양정정밀(symmetric positive‑definite) 성질을 유지하도록 하는 정규화 항을 포함한다. 또한, Jacobian의 부드러움이나 노이즈 수준 등에 대한 통계적 사전(prior)을 가정해 네트워크가 과적합되지 않도록 한다.
메트릭이 추정되면, 저자는 전통적인 LS‑MDS(Least‑Squares Multidimensional Scaling) 최적화에 ˜d_{ij} 를 목표 거리로 사용한다. 스트레스 함수 σ=∑_{i
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기