Assur 그래프의 기하학적 특성 및 특이 위치 분석
본 논문은 평면 메커니즘 분석에 핵심적인 최소 이소스태틱 핀드 프레임워크인 Assur 그래프의 기하학적 성질을 탐구한다. 특히 모든 간선에 비제로 자가응력이 존재하고, 내부 정점 전체에 비제로 1차 운동이 존재하는 특이 실현을 이용해 Assur 그래프를 새로운 기하학적 조건으로 등가화한다. 이러한 특이 위치는 메커니즘이 ‘데드‑엔드’에 도달해 멈추거나 잠기는 현상과 직접 연결된다.
저자: Brigitte Servatius, Offer Shai, Walter Whiteley
본 논문은 평면 메커니즘 설계에서 핵심적인 역할을 하는 최소 이소스태틱 핀드 프레임워크, 즉 Assur 그래프의 기하학적 특성을 심도 있게 탐구한다. 서론에서는 이전 연구에서 제시된 Assur 그래프의 조합론적 정의를 재언급하고, 이러한 그래프가 실제 메커니즘의 ‘데드‑엔드’ 현상과 어떻게 연결되는지를 설명한다.
2장에서는 강성 이론의 기본 개념을 정리한다. 프레임워크 G(p) 는 그래프 G=(V,E)와 정점 배치 p 의 쌍으로 정의되며, 강성 행렬 R_G(p) 는 각 간선에 대한 일차 운동 방정식 (p_i−p_j)·(p'_i−p'_j)=0 을 행렬 형태로 나타낸다. 행렬의 열 랭크가 2|V|−3 이면 무한소 강성, 행의 코커널이 비자명하면 자가응력(스스로 균형을 이루는 힘) 이 존재한다. Laman 정리는 평면에서 이소스태틱 그래프를 |E|=2|V|−3 및 모든 부분그래프 F 에 대해 |F|≤2|V(F)|−3 이라는 두 조건으로 완전히 특징짓는다.
2.2절에서는 강성 회로(rigidity circuit)의 정의와 특성을 소개한다. 회로는 최소 의존 집합으로, |E|=2|V|−2 이며 모든 비공허 부분집합이 Laman 부등식을 만족한다. 평면 임베딩이 가능한 회로는 정점 수와 면(face) 수가 동일하고, 그 기하학적 이중(dual) 역시 회로가 된다.
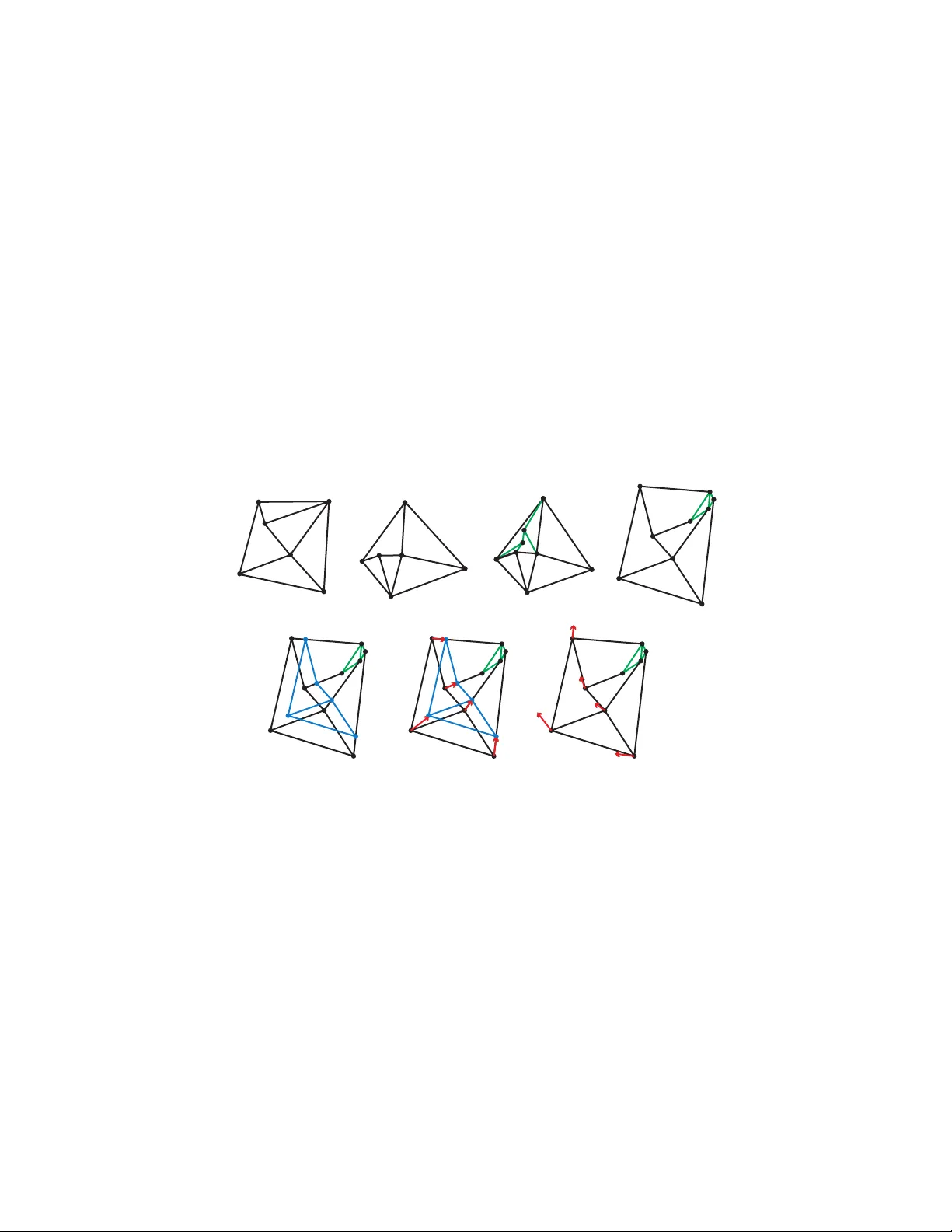
2.3절에서는 복수대(Reciprocal diagram) 기법을 설명한다. 평면 그래프에 자가응력이 주어지면, 각 정점에서 힘 벡터를 순서대로 이어 다각형을 만들고, 이 다각형들을 이중 그래프의 정점에 대응시켜 복수대를 구성한다. 복수대는 원 그래프와 평행 관계를 유지하며, 복수대의 변 길이가 원 그래프의 응력 크기에 비례한다. 정리 2에 의해 복수대 존재는 자가응력 존재와 동등하고, 이는 첫 번째 운동 공간과도 동형성을 이룬다.
2.4절에서는 핀드 프레임워크의 정의와 ‘핀드 프레임워크 조건(Pinned Framework Conditions)’을 제시한다. 핀드 그래프 G(I,P;E) 는 내부 정점 I, 고정된 핀 P, 그리고 적어도 하나의 내부 정점을 포함하는 간선 집합 E 으로 구성된다. 조건은 |E|=2|I| 와 모든 부분그래프에 대한 간선 수 제한을 포함한다. 정리 3은 이 조건이 만족될 때 그래프가 이소스태틱 실현을 가짐을 보인다.
2.5절에서는 Assur 그래프의 조합론적 특성을 네 가지 동등한 조건으로 제시한다. (i) 최소 핀드 이소스태틱성, (ii) 핀을 하나로 수축했을 때 강성 회로가 됨, (iii) 내부 정점이 하나이거나 정점을 제거할 때마다 내부 정점 전체가 자유롭게 움직임, (iv) 간선을 하나 제거하면 내부 정점 전체가 자유롭게 움직임. 정리 5는 모든 이소스태틱 핀드 프레임워크가 Assur 구성요소로 유일하게 분해될 수 있음을 증명한다. 이 분해는 부분 순서를 정의하고, ‘Assur 스키마’라는 그래픽 표현으로 시각화된다.
3장에서는 Assur 그래프의 특이 실현을 다룬다. 일반적인 실현에서는 강성 행렬의 행렬식이 비제로이지만, 특이 실현에서는 ‘Pure Condition’이라는 다항식이 0이 된다. 특히 정리 6은 다음 두 조건을 만족하는 특이 실현이 존재하면 해당 핀드 그래프는 반드시 Assur 그래프임을 보인다. (1) 모든 간선에 비제로 자가응력이 하나만 존재하고, (2) 모든 내부 정점에 비제로 1차 운동이 하나만 존재한다. 증명은 먼저 |E|=2|I| 임을 보이며, 이는 핀드 이소스태틱임을 의미한다. 그 후, 그래프가 Assur가 아니라면 최소 Assur 서브그래프 G_A와 나머지 G_1 으로 분해될 수 있고, 강성 행렬은 블록 상삼각 형태가 된다. 그러나 전체 그래프에 존재하는 유일한 1차 운동이 G_A 에만 비제로라면, G_A 의 강성 행렬이 비자명한 해를 가져야 하므로 모순이 발생한다. 따라서 가정이 성립하려면 그래프 자체가 Assur 그래프여야 함을 증명한다.
이 결과는 특이 위치에서 ‘정적 자가응력 + 동적 1차 운동’이 동시에 존재함을 의미하며, 이는 메커니즘이 ‘데드‑엔드’ 혹은 ‘잼(jam)’ 현상에 도달했을 때 나타난다. 드라이버가 삽입된 메커니즘이 이러한 특이 실현에 도달하면, 자가응력으로 인해 힘이 내부에 고정되고, 유일한 1차 운동이 더 이상 진행 방향을 제공하지 못해 움직임이 멈춘다. 이는 설계 단계에서 위험 구역을 사전에 식별하고 회피할 수 있는 기하학적 기준을 제공한다.
마지막으로 논문은 복수대와 강성 회로를 이용한 시각화 기법, 특이 실현의 대수적 구조, 그리고 메커니즘 설계에의 적용 가능성을 논의하며, 향후 연구 방향으로 고차원 메커니즘, 비평면 그래프, 그리고 동적 로드 상황에서의 자가응력 변화를 탐구할 것을 제안한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기