최소 후회 탐색을 통한 단일 및 다중 작업 최적화
본 논문은 베이지안 최적화에서 새로운 획득 함수인 최소 후회 탐색(MRS)을 제안한다. MRS는 정보 이론 기반 방법인 엔트로피 서치와 유사하지만, 최종 추천점의 기대 단순 후회를 최소화하는 데 초점을 맞춘다. 실험 결과 MRS는 평균 및 중앙값 성능에서 기존 방법과 비슷하거나 우수하며, 특히 높은 후회를 보이는 이상치가 적다. 또한 다중 작업 로봇 제어 문제에도 확장 가능함을 보여준다.
저자: Jan Hendrik Metzen
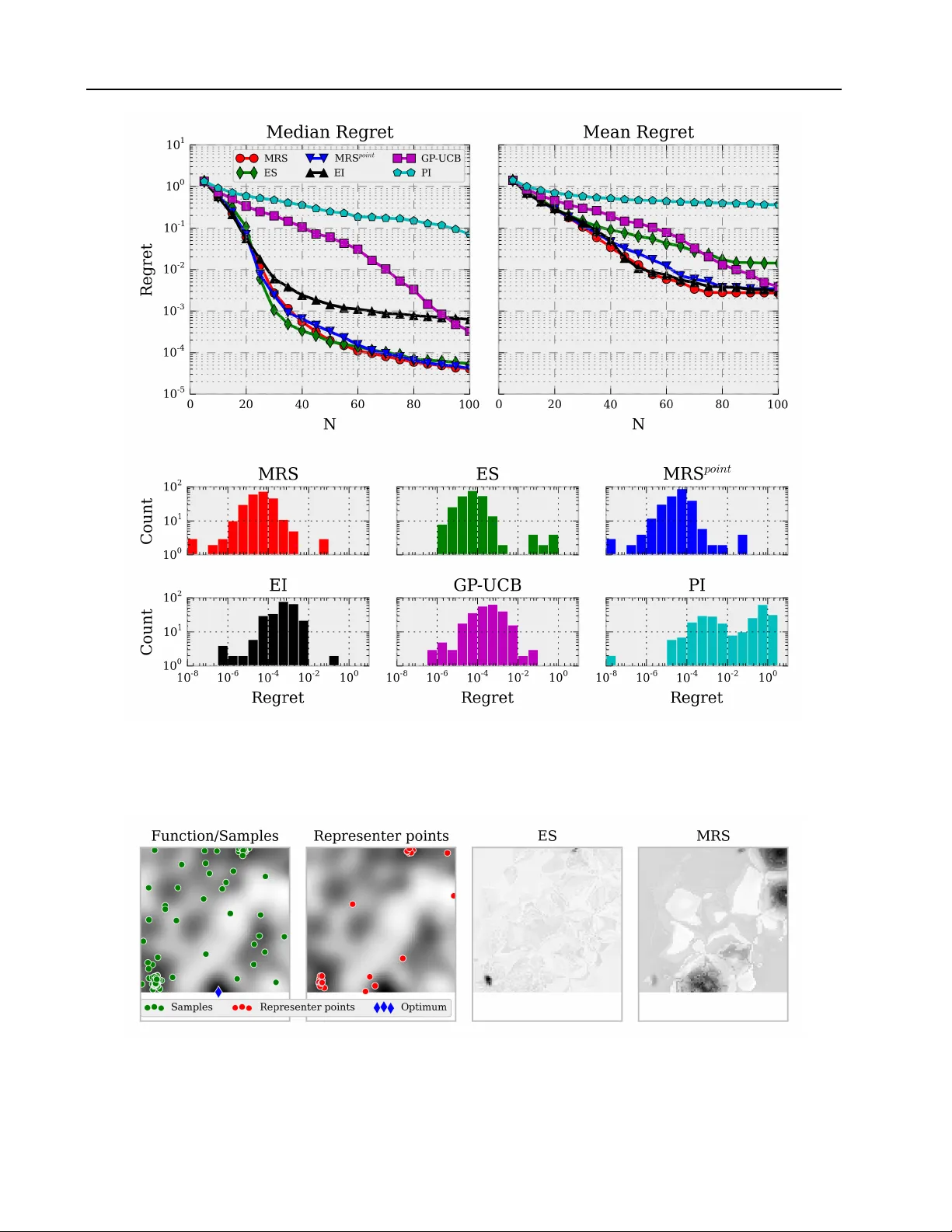
베이지안 최적화는 비용이 많이 드는 블랙박스 함수를 최소 횟수의 평가로 최적화하고자 할 때 널리 사용되는 프레임워크이다. 핵심은 이전 관측을 기반으로 만든 확률적 대리 모델(주로 가우시안 프로세스)와, 다음 관측 위치를 결정하는 획득 함수이다. 기존에는 탐색‑활용 균형을 맞추는 UCB, 기대 개선(EI) 등과, 최적점 위치에 대한 불확실성을 최소화하는 엔트로피 서치(ES)·예측 엔트로피 서치(PES) 등이 제안되었다. 그러나 ES·PES는 “최적점이 어디에 있는가”라는 내부 목표에 초점을 맞추며, 실제 BO가 최종적으로 선택하는 추천점의 단순 후회와는 직접적인 연관성이 부족할 수 있다. 특히, ES는 최적점 분포 p?(x)의 엔트로피 감소에 기여하는 쿼리를 선택하지만, 그 쿼리가 기대 후회를 크게 감소시키는지는 보장되지 않는다.
이를 해결하고자 저자들은 최소 후회 탐색(MRS)이라는 새로운 획득 함수를 제안한다. MRS는 현재 사후분포 p_n(f) 하에서 각 후보점 x에 대한 기대 단순 후회 ER(p_n)(x)=E_{p_n}
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기