선형 가역 변환의 전이 일관성 동기화
본 논문은 유클리드 좌표계 사이의 선형 가역 변환 집합이 실제 측정에서 발생하는 전이 일관성 결함을 보정하는 방법을 제시한다. 그래프 이론을 기반으로 중앙집중식과 분산식 두 종류의 동기화 알고리즘을 개발하고, 직교 행렬, 아핀 변환, 유클리드 변환에 각각 적용한다. SVD와 Gauss‑Newton을 활용한 해법은 간단하면서도 높은 정확도를 보이며, 최적성 갭에 대한 이론적 상한도 제공한다.
저자: Johan Thunberg, Florian Bernard, Jorge Goncalves
본 논문은 유클리드 좌표계 사이의 선형 가역 변환이 실제 데이터에서 전이 일관성(transitive consistency)을 만족하지 못하는 문제를 다루며, 이를 보정하는 일련의 알고리즘을 제시한다. 전이 일관성이란, 임의의 세 좌표계 A, B, C에 대해 변환 G_{AC}=G_{AB}·G_{BC}가 성립하는 성질을 말한다. 실제 측정에서는 잡음, 누락된 관측, 비선형 추정 오류 등으로 인해 이 식이 깨지게 된다. 논문은 이러한 비일관성을 최소화하면서 원래 변환에 가까운 새로운 변환 집합 {G^*_{ij}}를 찾는 문제를 수학적으로 정형화한다.
첫 단계로, 변환을 그래프 G=(V,E)와 연결한다. 노드 V는 좌표계, 간선 E는 관측된 변환 G_{ij}∈GL(d,ℝ)이다. 전이 일관성을 만족하려면 존재하는 {G_i}에 대해 G^*_{ij}=G_i^{-1}G_j가 되어야 한다. 이를 만족시키는 {G_i}를 찾는 것이 핵심이다.
**1) 중앙집중식 방법**
- **Z‑matrix 방법**: 모든 변환을 d×d 블록 행렬로 배열하고, 각 블록이 만족해야 할 선형 제약식을 행렬 Z에 정리한다. Z는 (nd)×(nd) 크기의 희소 행렬이며, 전이 일관성을 만족하는 경우 Z·x=0을 만족하는 비자명 해 x가 존재한다. 여기서 x는 각 노드의 변환을 열벡터 형태로 나열한 것이다. QSC(Quasi‑Strongly Connected) 그래프이면 Z의 영공간 차원이 정확히 d가 되며, SVD를 통해 영공간을 구하면 {G_i}를 복원할 수 있다. 이 방법은 방향성 그래프에서도 적용 가능하고, 계산량이 O(nd^2) 수준이다.
- **H‑matrix 방법**: 목적함수 f({G_i})=∑_{(i,j)∈E}‖G_{ij}−G_i^{-1}G_j‖_F^2의 헤시안 H를 구성한다. H=Z+Z^T 형태이며, 대칭 그래프에서는 H가 양정밀(positive semidefinite)이다. H·x=0을 만족하는 영공간을 구하면 역시 {G_i}를 얻는다. H‑matrix는 Z‑matrix보다 수치적으로 더 안정적이며, 영공간 차원이 d이면 전이 일관성이 보장된다. 또한 H는 실제 목적함수의 2차 근사이므로, 최적화 초기값으로 활용하기에 적합하다.
**2) Gauss‑Newton 반복**
H‑matrix 해를 초기값으로 사용해, 비선형 최소제곱 문제를 Gauss‑Newton 방식으로 풀어 더 정확한 {G_i}를 얻는다. 직교 행렬인 경우, 목적함수가 구형(quadratic) 형태이므로 반복이 거의 필요 없으며, 아핀·유클리드 변환에서는 10~15회 반복으로 수렴한다. 이 과정에서 각 단계마다 Jacobian과 Hessian을 직접 계산하지 않고, H‑matrix 구조를 재활용해 연산량을 크게 줄인다.
**3) 직교 행렬 전용 이론**
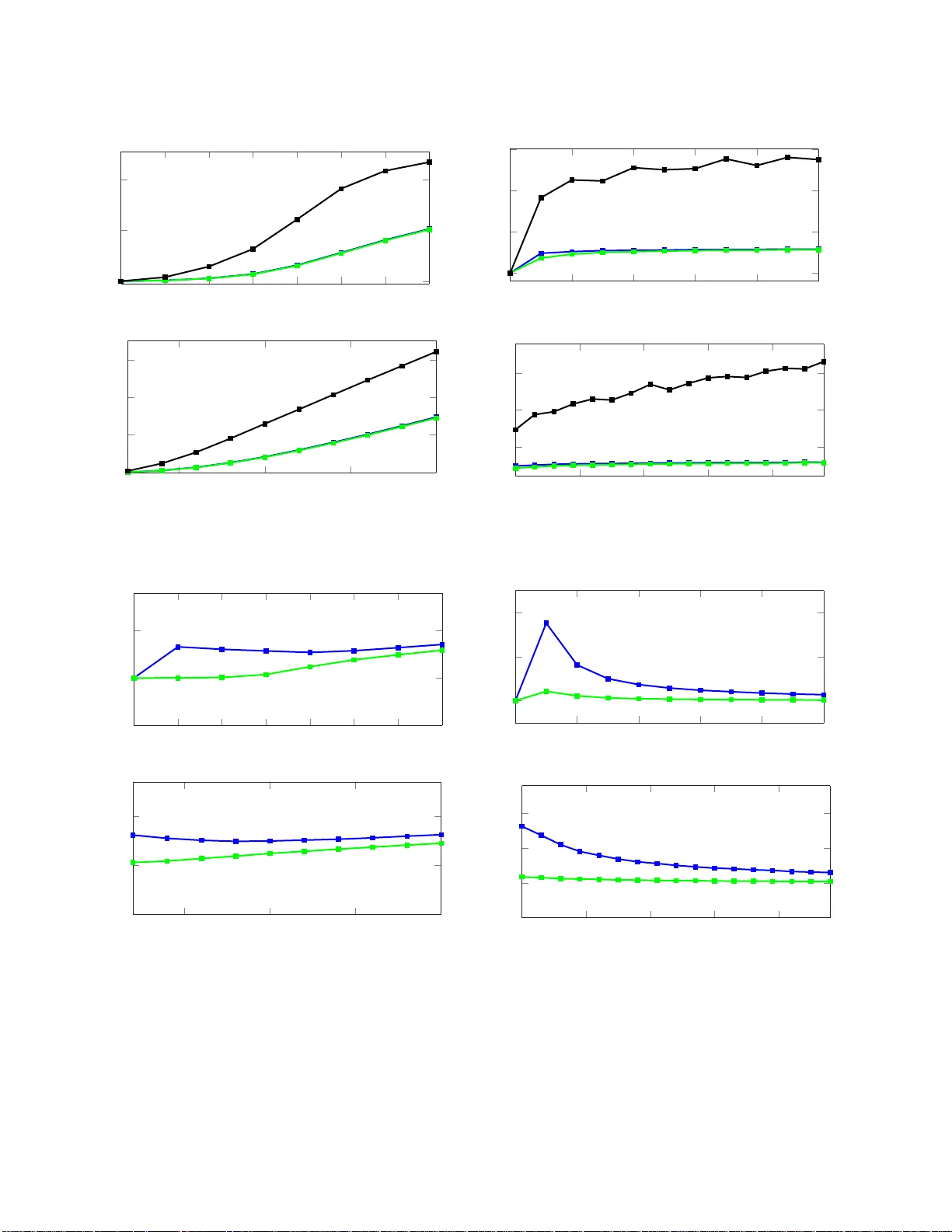
G_{ij}∈O(d)인 경우, 최적성 갭(실제 최소값과 알고리즘이 도출한 값의 차이)에 대한 상한을 증명한다. 상한은 입력 노이즈의 분산과 그래프의 알제브라적 특성(라플라시안의 최소 비영 고유값)으로 표현되며, 실험에서는 평균 갭이 0.1% 이하로 거의 최적에 도달함을 확인한다. 이는 실제 로봇 군집이나 카메라 네트워크에서 실시간 동기화가 가능함을 의미한다.
**4) 분산식 알고리즘**
직교 행렬에 대해 두 가지 분산 합의 프로토콜을 제시한다.
- **Z‑matrix 기반 분산 합의**: 각 노드 i는 자신의 상태 G_i와 이웃으로부터 받은 G_{ij}를 이용해 업데이트한다. 업데이트 식은 G_i←Proj_O(d)(∑_{j∈N_i} w_{ij} G_j) 형태이며, 여기서 Proj_O(d) 는 SVD 후 정규 직교 행렬로 투영한다. QSC 그래프이면 수렴이 보장된다.
- **H‑matrix 기반 분산 합의**: 대칭 그래프에서 라플라시안 L을 이용해 G_i←G_i−α∑_{j∈N_i}(G_i−G_j) 형태로 업데이트한다. 이는 전통적인 평균 합의와 동일하지만, 행렬 곱과 전치가 포함된다. λ_2(L)>0이면 선형 수렴률을 갖는다.
두 방법 모두 수렴 속도와 정확도에서 거의 동일하며, 구현이 간단하고 병렬화가 용이하다. 특히 대규모 네트워크에서 통신 비용을 최소화하면서 전이 일관성을 달성할 수 있다.
**5) 아핀·유클리드 변환 확장**
아핀 변환은 G_{ij}=
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기