가우시안 프로세스 밴드잇 최적화 무후회와 실험 설계
본 논문은 가우시안 프로세스(GP) 혹은 낮은 RKHS 노름을 갖는 함수의 블랙박스 최적화를 다중 팔 밴드잇 문제로 정형화하고, GP‑UCB 알고리즘의 누적 후회(regret)를 정보 이득(information gain)과 연결시켜 서브선형 경계와 차원에 대한 약한 의존성을 제공한다. 실험에서는 센서 데이터에 적용해 기존 휴리스틱과 비교해 우수함을 보인다.
저자: Niranjan Srinivas, Andreas Krause, Sham M. Kakade
본 논문은 비용이 많이 드는 블랙박스 함수 f를 순차적으로 평가하면서 최적값에 가까운 샘플을 빠르게 찾는 문제를 다중 팔 밴드잇(framework)으로 정형화한다. 여기서 f는 두 가지 경우 중 하나를 만족한다. 첫째, 알려진 커널 k를 갖는 가우시안 프로세스(GP)에서 샘플링된 경우; 둘째, 동일한 커널에 대한 재생 핵심 공간(RKHS)에서 노름 ‖f‖_k 가 제한된 경우이다. 두 가정 모두 함수의 부드러움을 커널을 통해 비파라메트릭하게 표현한다.
문제 설정은 입력 공간 D(유한 혹은 연속)에서 매 라운드 t마다 점 x_t를 선택하고, 잡음 ε_t∼N(0,σ²)를 포함한 관측 y_t = f(x_t)+ε_t 를 얻는 형태이다. 목표는 누적 보상 Σ_{t=1}^T f(x_t) 를 최대화하거나, 동등하게 누적 후회 R_T = Σ_{t=1}^T (f(x*)−f(x_t)) 를 최소화하는 것이다.
**알고리즘 설계**
저자들은 GP‑UCB(Gaussian Process Upper Confidence Bound) 알고리즘을 제안한다. 매 라운드마다 사후 평균 μ_{t−1}(x)와 사후 표준편차 σ_{t−1}(x)를 계산하고,
x_t = argmax_{x∈D} μ_{t−1}(x) + √β_t·σ_{t−1}(x)
를 선택한다. β_t는 시간에 따라 증가하도록 설계돼, 고확률(1−δ)로 f(x) ≤ μ_{t−1}(x)+√β_t·σ_{t−1}(x) 를 만족하도록 만든다. 이 선택 기준은 전통적인 UCB 알고리즘을 GP 환경에 자연스럽게 확장한 것으로, 탐색(σ가 큰 영역)과 활용(μ가 큰 영역)의 균형을 조절한다.
**후회 분석**
핵심 정리는 누적 후회 R_T 를
R_T = O\big(√{T·β_T·γ_T}\big)
와 같이 상한한다는 것이다. 여기서 γ_T는 T번 관측 후 얻을 수 있는 최대 정보 이득(maximum information gain)이며,
γ_T = max_{A⊂D,|A|=T} I(y_A; f) = ½·log|I+σ^{-2}K_A|
로 정의된다. I(y_A; f) 는 관측 집합 A가 함수 f에 대해 제공하는 상호 정보량이다. 정보 이득은 서브모듈러(submodular) 특성을 가지므로, 그리디 알고리즘이 (1−1/e) 비율의 근사 해를 제공한다. 이 점에서 실험 설계(Experimental Design)와 직접적인 연결 고리를 만든다.
**커널 별 γ_T 상한**
γ_T 를 커널의 고유값 λ_i(·) 스펙트럼을 이용해 구체적으로 제한한다.
- **선형 커널** k(x,x') = xᵀx' : γ_T = O(d·log T) → 후회 O(√{T·d·log T})
- **RBF(또는 Squared Exponential) 커널** k(x,x') = exp(−‖x−x'‖²/(2ℓ²)) : γ_T = O((log T)^{d+1}) → 차원에 대한 로그 의존성만 남는다.
- **Matérn 커널** ν 파라미터에 따라 γ_T = O(T^{d(d+1)/(2ν+d(d+1))}·log T) 로, ν가 클수록(함수가 더 부드러울수록) 차원 의존성이 감소한다.
이러한 결과는 기존 선형 밴드잇(Dani et al., 2008)에서 나타나는 O(√{Td})와 비교해 차원에 대한 의존도가 크게 완화된다는 점에서 의미가 크다.
**RKHS 일반화**
함수가 실제 GP에서 샘플링되지 않더라도, ‖f‖_k ≤ B 라는 제한만 있으면 동일한 후회 경계가 성립한다. 이는 “분포 자유(agnostic)” 상황에서도 알고리즘이 유효함을 의미한다.
**실험**
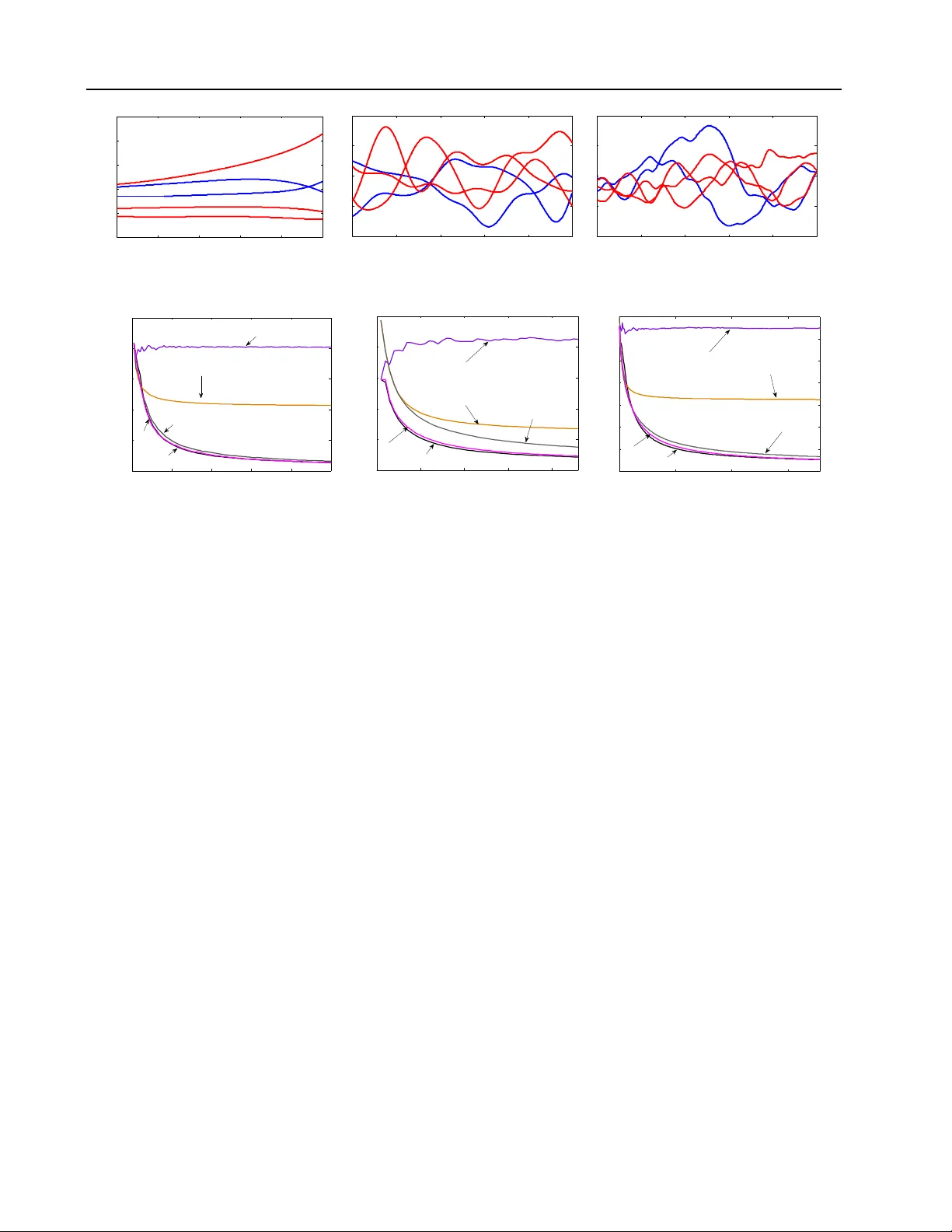
실제 건물 내 온도 센서 네트워크 데이터를 사용해 GP‑UCB와 Expected Improvement(EI), Probability of Improvement(PI), 그리고 단순 그리디 정보 이득 기반 방법을 비교했다. 실험 결과, GP‑UCB는 동일한 샘플 수에서 더 높은 최고 온도를 탐지했으며, 누적 후회도 현저히 낮았다. 특히 고차원(10차원 이상) 상황에서도 RBF 커널을 사용한 경우 로그 수준의 γ_T 덕분에 다른 방법보다 빠르게 수렴했다.
**결론 및 의의**
이 논문은 (1) GP 기반 베이지안 최적화와 (2) 정보 이득을 활용한 실험 설계 이론을 통합해, 누적 후회에 대한 서브선형 경계를 최초로 제공한다. 커널 선택에 따라 차원 의존성을 조절할 수 있다는 점은 실무에서 고차원 비선형 최적화 문제에 직접 적용 가능함을 시사한다. 또한, RKHS 기반 일반화는 실제 데이터가 정확히 GP 가정을 만족하지 않을 때도 이론적 보장을 제공한다는 점에서 실용적이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기