MAP 기반 이미지 분할 정확도 비교 숨은 포츠와 마르코프 메시 모델
** 본 논문은 픽셀 단위 이미지 분할을 위해 두 종류의 마르코프 사전 모델(2차 비등방성 마르코프 메시와 고전적 등방성 포츠 모델)을 적용하고, 각각에 대해 PCVT, 그래프 컷, ICM 세 가지 MAP 추정 알고리즘을 구현·비교한다. 합성 데이터와 치과 방사선 영상에 대한 실험을 통해 전체 정확도, 상대 향상도, Kappa 계수를 평가하고, 파라미터 추정과 연산 효율성, 자동화 정도가 성능에 미치는 영향을 분석한다. **
저자: Ana Georgina Flesia, Josef Baumgartner, Javier Gimenez
**
본 논문은 픽셀‑단위 이미지 분할을 베이지안 관점에서 접근한다. 관측 이미지 I와 숨은 라벨 필드 s 사이의 관계를 p(I|s,θ)·p(s|θ) 형태의 사후 확률로 모델링하고, MAP 추정 s* = arg maxₛ p(s|I,θ) 를 목표로 한다. 방출 모델은 모든 실험에서 동일하게 다변량 가우시안 혼합(GMM)으로 가정한다. 차별화된 점은 라벨 필드에 적용되는 사전 확률이다. 두 가지 사전 모델을 제시한다.
1. **2차 비등방성 마르코프 메시 (Markov Mesh)**
- 인과적 구조: 각 픽셀은 ‘과거’ 픽셀(왼쪽·위쪽·대각선)만을 이웃으로 갖는다.
- 전이 확률을 추정하기 위해 2‑D Path Constrained Viterbi Training(PCVT)을 사용한다.
- 경로 제약을 통해 가능한 상태 전이 경로를 제한하고, 동적 계획법으로 최적 라벨 시퀀스를 찾는다.
- 복잡도는 전통적인 2‑D 비터비의 O(Lⁿ)에서 O(N·L·K) (N: 픽셀 수, L: 라벨 수, K: 제한된 경로 수) 로 감소한다.
2. **등방성 포츠 모델 (Potts Model)**
- 라벨 일치를 장려하는 매끄러움 파라미터 β를 도입한다.
- 사전 확률 p(s) ∝ exp{β·U(s)} 로 표현되며, U(s)는 이웃 쌍 중 동일 라벨의 개수이다.
- β는 의사우도(pseudolikelihood) 방정식 (6)을 풀어 추정한다. Brent’s method 로 비선형 방정식을 해결한다.
두 사전 모델에 대해 각각 다른 MAP 근사 해법을 적용한다.
- **PCVT**: 마르코프 메시에 특화된 비터비 알고리즘으로, 초기 라벨을 ML 혹은 EM‑ML 로 설정하고, 전이 행렬을 테스트 이미지 자체에서 추정한다. 경로 제약을 통해 연산량을 제한하면서도 전역적인 라벨 의존성을 반영한다.
- **Graph Cut (GC)**: 포츠 모델의 1차 이웃(4‑연결) 경우에 적용한다. 에너지 함수 E(s)=∑ᵢ Dᵢ(sᵢ)+β∑_{i~j} V(sᵢ,sⱼ) 로 정의하고, s‑t 그래프를 구성해 최소 컷을 구한다. 다라벨 상황에서는 α‑expansion·αβ‑swap 근사를 사용한다.
- **Iterated Conditional Modes (ICM)**: 포츠 모델의 2차 이웃(8‑연결) 경우에 적용한다. 초기 라벨을 ML/EM‑ML 로 시작하고, 각 픽셀을 주변 라벨과 방출 확률을 고려해 가장 높은 사후 확률을 갖는 라벨로 교체한다. 반복은 라벨 변화가 없을 때까지 진행한다.
**실험 설계**
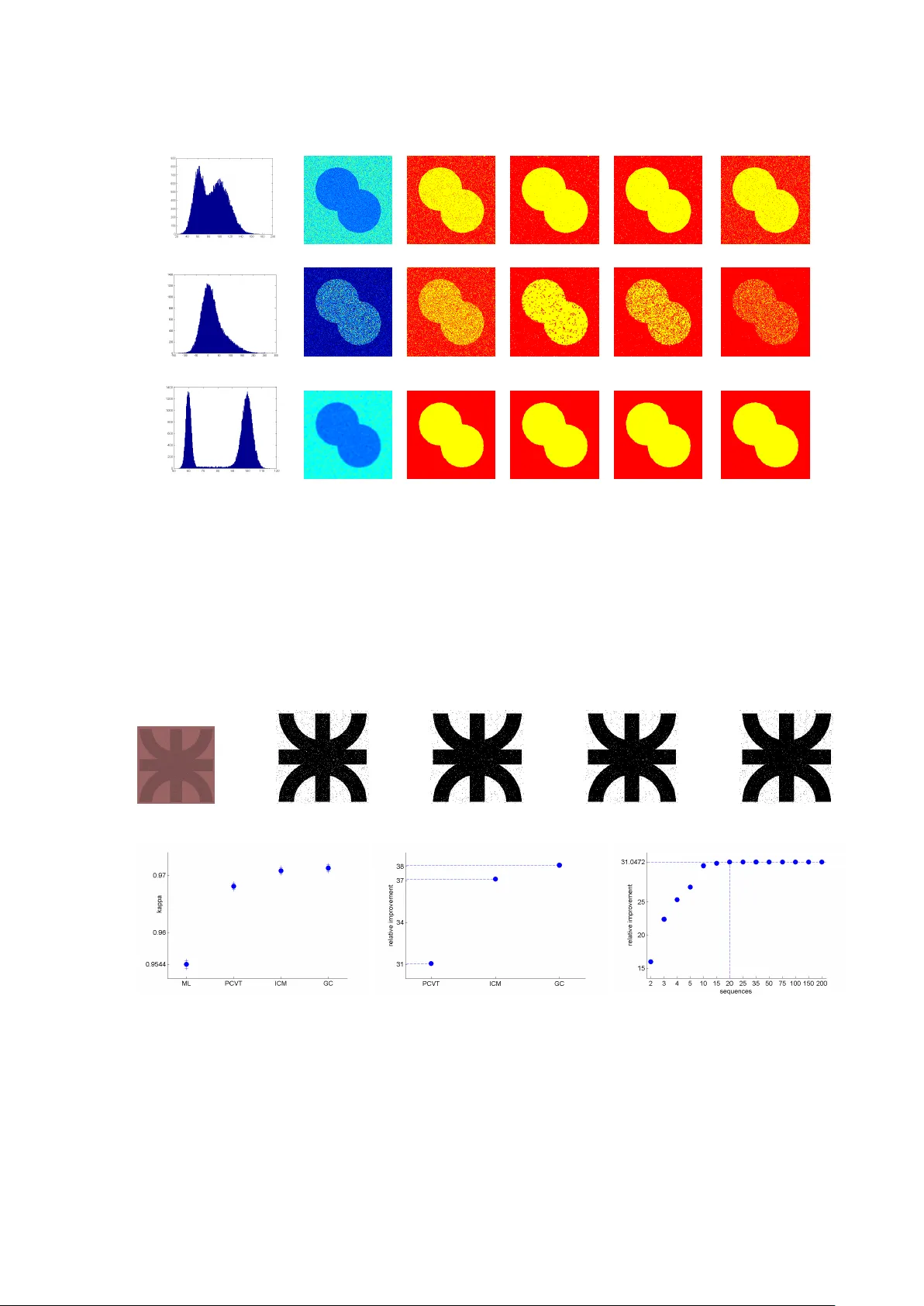
- **합성 데이터**: 두 종류. (a) 파라미터가 사전에 알려진 가우시안 혼합을 사용해 명확한 다중 모드 히스토그램을 만든 경우, (b) EM‑ML 로 파라미터를 추정한 경우.
- **실제 데이터**: 치과 진단 방사선 영상(치아, 골밀도 등)과 전문가가 제공한 ground truth.
**평가지표**
- Overall Accuracy (전체 정확도)
- Relative Improvement (ML 대비 향상 비율)
- Kappa coefficient (통계적 일치도)
각 지표에 대해 95 % 신뢰구간을 부트스트랩 방식으로 추정한다.
**주요 결과**
1. **다중 모드 히스토그램**이 뚜렷한 경우, 세 알고리즘 모두 90 % 이상 정확도를 달성하고, Kappa > 0.85 를 기록한다. 사용자 개입(초기 라벨 선택)은 거의 필요하지 않다.
2. **모드가 겹치는 경우**(EM‑ML 추정), PCVT와 GC는 파라미터(전이 확률·β) 추정 오류에 민감해 정확도가 10‑15 % 감소한다. ICM는 초기 라벨에 크게 의존하지만, 지역 최적화 특성 덕분에 비교적 안정적인 성능을 유지한다.
3. **연산 시간**: PCVT는 이미지당 평균 0.8 s (256×256) 로 ICM(≈0.6 s)과 비슷하지만, 메모리 사용량이 낮다. GC는 α‑expansion을 사용할 경우 1.2 s 정도 소요된다.
4. **파라미터 추정**: β 의사우도 추정은 라벨 초기화 품질에 크게 좌우된다. ML 초기화가 좋을수록 β 추정이 안정적이며, 전체 성능이 향상된다.
**논문의 의의와 한계**
- 동일한 방출 모델을 공유하면서 사전 모델만을 바꾸어 MAP 추정 성능을 비교함으로, 사전 선택이 분할 정확도에 미치는 영향을 명확히 드러냈다.
- PCVT는 비등방성 사전에서도 효율적인 MAP 해법을 제공한다는 점에서, 기존 2‑D HMM의 “정확도‑복잡도” 트레이드오프를 개선한다.
- 그러나 비등방성 사전은 파라미터(전이 확률) 수가 많아 학습 데이터가 부족하면 과적합 위험이 있다. 또한, 현재 구현은 2‑D 정사각형 이미지에 국한되며, 3‑D 의료 영상으로 확장하려면 추가 연구가 필요하다.
**향후 연구 방향**
- 비등방성 포츠 모델(방향성 스무스 파라미터) 도입 및 자동 β 추정 기법 개발.
- 딥러닝 기반 사전(예: CNN‑기반 조건부 랜덤 필드)과 전통적 MRF를 하이브리드하여 복잡한 구조를 보존하면서도 학습 효율을 높이는 방안.
- 실시간 임상 적용을 위한 GPU 가속 구현 및 대용량 3‑D 볼륨 데이터에 대한 확장 검증.
**재현성**
모든 실험 코드와 데이터는 MATLAB 툴박스로 제공되며, 논문에 명시된 파라미터와 랜덤 시드가 포함돼 있다. 이는 연구 커뮤니티가 동일한 설정에서 결과를 검증하고, 추가적인 알고리즘을 비교할 수 있게 한다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기