동적 협동 게임의 라플라스 안정성 및 로버스트 할당 규칙 설계
본 논문은 연속시간 평균-에르고딕 과정을 특징 함수로 갖는 전이가능 효용(TU) 동적 협동 게임을 다룬다. 중앙 계획자는 예산 제약 하에 실시간 할당을 결정하며, 협동체가 지금까지 받은 초과 보상을 관측한다. 저자는 (1) 전체 초과 보상을 완전 관측할 때 평균 할당이 평균 게임의 핵심 내 특정 점으로 수렴하도록 하는 할당 규칙을, (2) 초과 보상의 부호만 부분적으로 알 때 평균 할당이 핵심 전체에 수렴하도록 하는 규칙을 제시한다. 두 규칙 …
저자: Dario Bauso, Puduru Viswanadha Reddy, Tamer Basar
본 논문은 전이가능 효용(TU) 동적 협동 게임을 새로운 관점에서 모델링하고, 라플라스 확률 안정성 이론을 활용한 로버스트 할당 규칙을 설계한다.
1. **문제 설정**
- 플레이어 집합 N={1,…,n}와 모든 비공허 협동체 S⊆N를 고려한다.
- 특성 함수 v(t)∈R^m은 연속시간 유계 평균‑에르고딕 과정으로, 각 순간에 V라는 유계 볼록 집합 안에서 샘플링되고, 장기 평균값 v̄_nom=lim_{t→∞} \(\bar v(t)\)가 존재한다.
- 평균 게임 의 핵심 C(v̄_nom)이 비어 있지 않다는 균형성 가정(Assumption 1)을 둔다.
- 중앙 계획자는 예산 제약 a_min ≤ a(t) ≤ a_max을 만족하는 할당 a(t)∈R^n을 실시간으로 결정한다.
2. **초과 보상 정의 및 관측**
- 각 협동체 S의 초과 보상 ε_S(t)=∑_{i∈S}∫_0^t a_i(τ)dτ−∫_0^t v_S(τ)dτ+ε_S(0) 로 정의한다.
- ε(0)=0이라 가정하고, ε(t)∈R^m을 시스템 상태로 본다.
- 두 가지 정보 시나리오를 고려한다. (i) ε(t)를 완전 관측, (ii) ε(t)의 부호(sign)만 관측.
3. **주요 결과**
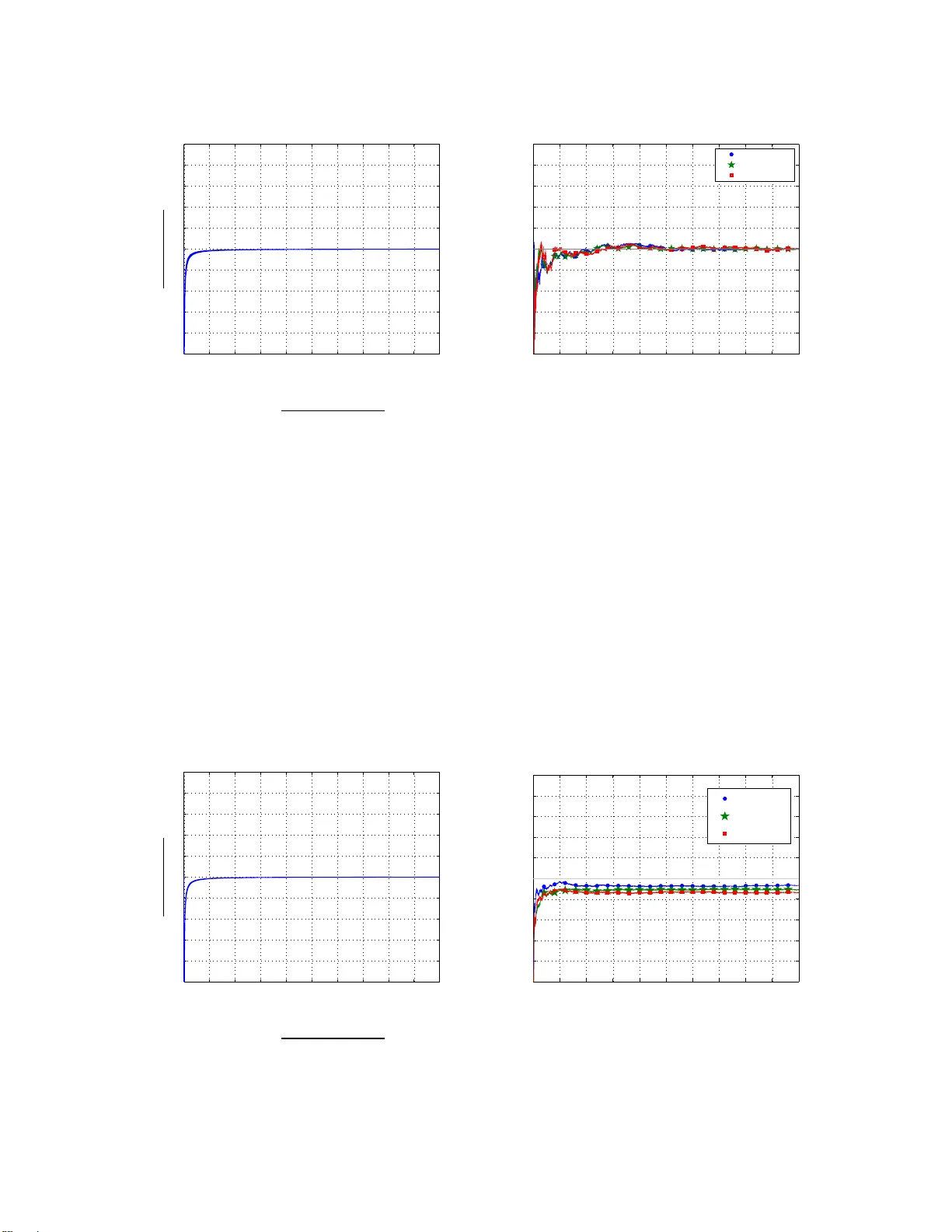
- **Theorem 4.1 (Full Observation)**: 할당 규칙 a(t)=a_nom−K·ε(t) (K>0 대각 행렬) 를 적용하면, 라플라스 함수 V(ε)=½‖ε‖²에 대해 dV/dt≤−λV (λ>0) 가 성립한다. 따라서 ε(t)→α·t (α는 사전 지정된 양의 벡터)이며, 평균 할당 \(\bar a(t)\)는 거의 확실히 a_nom∈C(v̄_nom) 로 수렴한다.
- **Theorem 4.2 (Partial Observation)**: ε(t)의 부호만 이용해 a_i(t)를 다음과 같이 업데이트한다. ε_i(t)>0이면 a_i(t)를 감소시키고, ε_i(t)<0이면 증가시킨다. 이때 K_i>0를 적절히 선택하면 ε(t)∈R^m_+ (모든 초과 보상이 비음수) 를 유지하면서 \(\bar a(t)\)는 C(v̄_nom) 전체에 수렴한다.
- 두 정리 모두 ‘almost sure convergence’(확률 1 수렴)를 보장한다.
4. **증명 기법**
- 라플라스 확률 안정성 이론을 활용해 마르코프 연속시간 시스템의 생성자를 구성하고, 기대값 연산을 통해 V의 평균 미분을 평가한다.
- 접근 가능성 이론을 통해 목표 집합(핵심 혹은 지정된 방향)으로의 ‘접근’ 조건을 확인하고, 달성 가능성 이론을 이용해 실제 ‘달성’(수렴)까지의 충분조건을 제시한다.
5. **연관 연구와 차별점**
- 기존 확률적 협동 게임은 확률분포를 가정하거나 정적 가치에 초점을 맞추었지만, 본 논문은 확률분포를 전혀 모르는 UBB 상황을 다룬다.
- 또한, 동적 평균 게임을 도입해 순간 가치의 변동성을 평균값으로 평탄화하고, 이를 네트워크 흐름 제어 문제에 매핑한다.
- 할당 규칙을 ‘제어 정책’으로 해석함으로써 제어 이론의 강력한 안정성 도구를 게임 이론에 적용한 점이 혁신적이다.
6. **응용 예시**
- 논문은 공급망 네트워크를 예시로 제시한다. 중앙 창고가 여러 소매점에 물품을 배분하고, 각 소매점의 수요는 시간에 따라 변동한다. 초과 보상은 재고 부족 혹은 과잉에 해당하며, 제시된 할당 규칙을 통해 중앙 창고는 실시간으로 물류 비용을 최소화하면서 모든 소매점의 초과 보상을 비음수(또는 지정된 방향)로 유지할 수 있다.
7. **결론 및 향후 연구**
- 라플라스 확률 안정성을 기반으로 한 두 가지 로버스트 할당 규칙이 평균 게임의 핵심 수렴과 초과 보상 제어를 동시에 달성함을 증명하였다.
- 향후 연구는 (i) 비선형 비용 구조, (ii) 다중 중앙 계획자 간 경쟁, (iii) 부분 관측에서의 학습 기반 추정기 도입 등을 통해 모델을 확장할 계획이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기