평면 형성 제어의 분산 제어 수학적 고찰
본 논문은 평면 상에서 다수의 자율 에이전트가 제한된 관측만을 이용해 목표 형상을 안정화시키는 문제를 다룬다. 이를 위해 비벡터 다양체 위의 전역 안정성 개념을 확장한 ‘type‑A 안정성’과 비선형 시스템의 강인성을 정의하고, 이러한 이론을 형성 제어에 적용한다. 특히 강체의 회전·이동 불변성을 이용해 상태공간을 복소 사영공간으로 모델링하고, 강성 이론을 통해 정보 흐름 그래프와 목표 형상의 관계를 분석한다. 2‑사이클과 같은 비자명한 정보 …
저자: M.-A. Belabbas
본 논문은 평면 상에서 다수의 자율 에이전트가 제한된 관측만을 이용해 목표 형상을 안정화시키는 ‘형성 제어’ 문제를 수학적으로 정밀히 분석한다. 먼저, 시스템이 매니폴드 M 위에서 정의될 때 전통적인 전역 안정성 개념이 적용되지 않을 수 있음을 지적한다. 특히 M 이 비자명한 동형군을 가질 경우 연속적인 피드백 u(x) 가 모든 평형점을 하나로 모을 수 없으므로, ‘type‑A 안정성’이라는 새로운 개념을 도입한다. 여기서는 설계 목표 집합 E_d 를 ‘feasible’하게 만들고, 설계 평형점이 모두 안정적이며 그 외의 평형점은 불안정(또는 안장)으로 제한함으로써 실질적인 전역 안정성을 확보한다.
다음으로 강인성(robustness)을 정의한다. 위상공간 S 상의 ‘generic’와 ‘robust’ 속성을 이용해, 작은 모델링 오차나 측정 노이즈가 발생해도 목표 평형점이 유지되는 제어법을 찾는다. 이때 제트 공간과 Thom 전이정리(Transversality theorem)를 주요 도구로 활용한다는 점이 눈에 띈다. 강인성은 제어법 u(x) 가 ‘jet‑space of lowest possible order’에 머무를 때 확보되며, 이는 고차 비선형 항을 최소화함으로써 실현된다.
형성 제어 본론에서는 n개의 에이전트 위치를 R²ⁿ 벡터 x 로 표현하고, 전체 시스템을 회전·이동 불변성을 고려해 복소 사영공간 CP^{n‑2} × (0,∞) 에 매핑한다. 그래프 G (정점 V, 간선 E) 를 이용해 거리 제약 δ 와 관측 함수 h 를 정의한다. 거리 제약은 δ(p) 함수로, 모든 에이전트 쌍 사이의 거리 제곱을 벡터화한 것이며, δ(p)|_E 는 실제 관측 가능한 간선에 대한 부분을 의미한다. 관측 함수 h 는 각 에이전트가 자신의 이웃으로부터 측정할 수 있는 거리와(또는) 상대 위치 정보를 포함한다.
강성 이론을 도입해, 강성 행렬 ∂δ/∂x|_E 의 랭크가 2n‑3 이면 ‘유한 강성(infinitesimally rigid)’임을 보인다. 이는 에이전트들의 위치가 회전·이동을 제외하고는 더 이상 자유롭게 움직일 수 없음을 의미한다. 강성은 설계 목표 µ 가 충분히 제약될 때, 정보 흐름 그래프 G_δ 와 관측 그래프 G_h 가 목표 형상을 분산적으로 전달할 수 있는 기반이 된다.
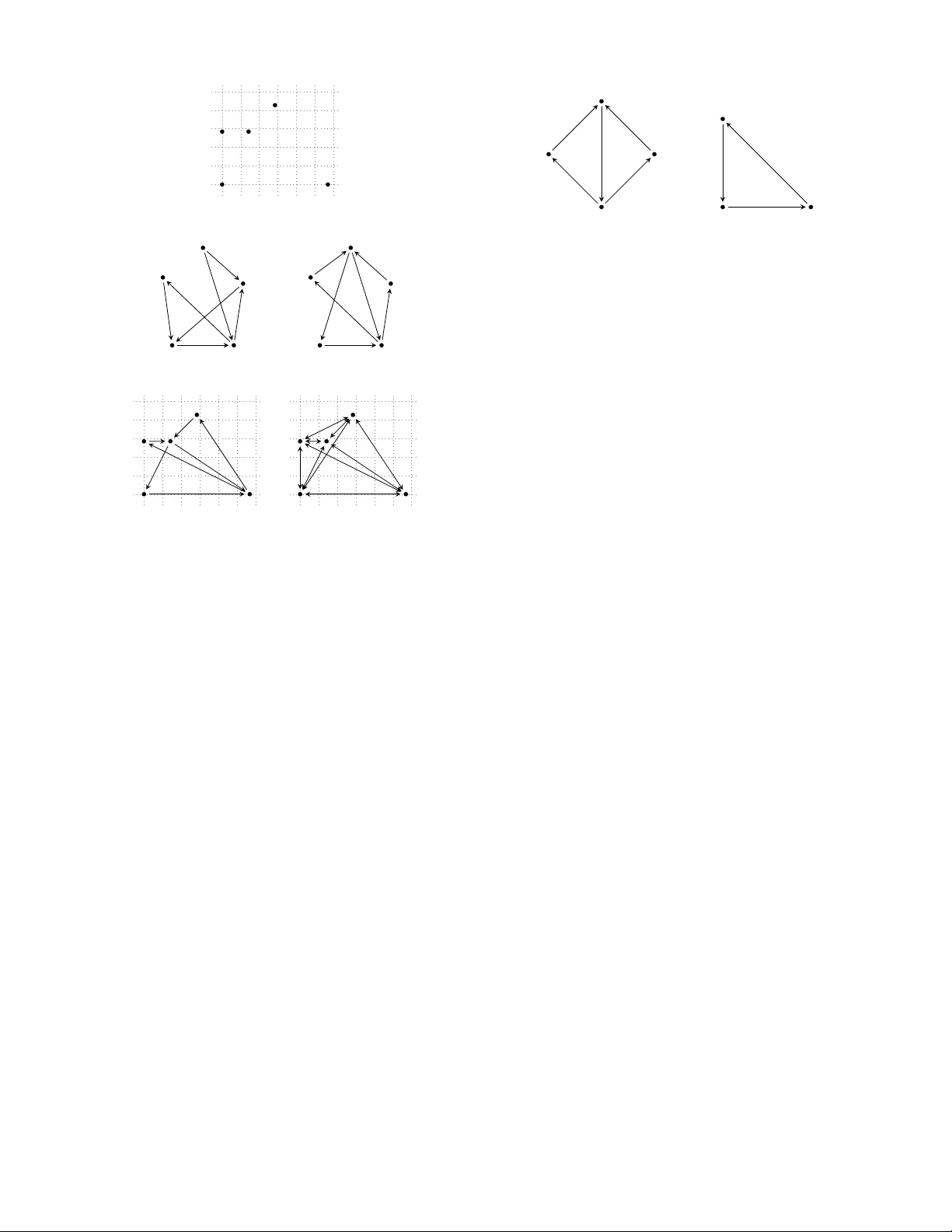
특히 논문은 ‘2‑cycles’ 형성이라는 최소한의 비자명 루프 구조를 상세히 분석한다. 두 개의 비자명한 정보 루프가 존재하면, 루프 내부에서 발생하는 비선형 상호작용 때문에 추가적인 ‘ancillary equilibrium’가 생성될 위험이 커진다. 이러한 평형점은 설계 목표와는 무관하게 안정될 수 있어 type‑A 안정성을 깨뜨린다. 저자는 이러한 현상을 강성 이론과 전이정리를 결합해, 루프가 존재하더라도 제어법을 설계할 수 있는 조건을 제시한다. 예를 들어, 루프가 포함된 그래프에서 각 에이전트가 거리와 내적 정보를 동시에 이용하도록 설계하면, 비자명 평형점이 안장으로 전이되어 type‑A 안정성을 회복할 수 있다.
논문은 또한 강인성 관점에서, 제어법 u(x) 가 ‘jet‑space of lowest possible order’에 머무를 때 강인성이 확보된다는 흥미로운 결과를 제시한다. 이는 실제 구현 시 센서 노이즈나 모델링 오차에 대한 내성을 크게 향상시킨다. 구체적으로, 제어법을 1차 미분(제트) 수준에서 설계하면, 작은 파라미터 변동이 평형점의 위치를 미세하게 이동시키지만 안정성 자체는 유지된다.
마지막으로, 기존 연구와 비교해 본 논문의 기여를 정리한다. (1) 매니폴드 위의 전역 안정성을 ‘type‑A 안정성’으로 일반화함으로써, 비벡터 다양체에서도 실용적인 안정성 개념을 제공한다. (2) 강인성을 위상학적 ‘generic’ 개념과 제트 공간을 통해 정량화하고, 설계 시 최소 차수의 제어법을 권장한다. (3) 형성 제어를 강성 이론과 결합해, 정보 흐름 그래프와 목표 형상 사이의 구조적 관계를 명확히 밝힌다. (4) 2‑cycles와 같은 비자명 루프가 존재할 때 발생하는 추가 평형점 문제를 분석하고, 이를 회피하거나 안장으로 전이시키는 설계 원칙을 제시한다.
이러한 결과는 드론 스웜, 로봇 군집, 자율 차량 플릿 등 복잡한 다중 에이전트 시스템에서 분산 제어 설계의 이론적 토대를 제공한다. 특히 비선형·다양체·강성·강인성이라는 네 축을 통합한 접근법은 향후 연구자들이 보다 일반적인 환경에서도 안정적인 형성 제어를 구현할 수 있게 할 것이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기