분산 프라임‑듀얼 서브그라디언트 방법을 이용한 부등식·등식 제약 최적화
본 논문은 다중 에이전트가 로컬 목적함수와 로컬 제약집합을 보유한 상황에서, 전역 부등식·등식 제약과 전역 제약집합을 만족하도록 전역 목적함수를 최소화하는 문제를 다룬다. 저자는 두 가지 경우(등식 제약이 없을 때와 로컬 제약집합이 동일할 때)를 대상으로 각각 분산 라그랑지안 프라임‑듀얼 서브그라디언트(DLPDS)와 분산 페널티 프라임‑듀얼 서브그라디언트(DPPDS) 알고리즘을 제안하고, 시간에 따라 변하는 그래프에서도 강연결성 가정 하에 수렴…
저자: Minghui Zhu, Sonia Martinez
본 논문은 다중 에이전트 시스템에서 전역 목적함수 f(x)=∑_{i=1}^N f_i(x)를 최소화하면서 전역 부등식 제약 g(x)≤0, 전역 등식 제약 h(x)=0, 그리고 전역 제약집합 X=∩_{i=1}^N X_i를 만족하도록 설계된 두 가지 분산 최적화 알고리즘을 제시한다. 연구 배경으로는 센서 네트워크, 로봇 군집, 전력 시스템 등에서 중앙 집중식 제어가 불가능하거나 비효율적인 경우가 늘어나면서, 로컬 정보와 인접 통신만을 이용한 분산 최적화가 중요한 연구 주제로 부상했음을 언급한다.
먼저 문제 정의를 명확히 하고, Slater 조건(∃ \bar{x}∈X: g(\bar{x})<0, h(\bar{x})=0)을 가정함으로써 강한 이중성(strong duality)과 최적값의 유한성을 확보한다. 네트워크 모델은 시간에 따라 변하는 유향 가중치 그래프 G(k)=(V,E(k),A(k))를 사용하며, 비퇴화(α>0), 균형 통신(행·열 합이 1), 주기적 강연결성(B)이라는 세 가지 표준 가정을 둔다.
**Case I: 등식 제약이 없는 경우**
문제 (2)에서는 h(x)=0을 제외하고, 라그랑지안 L(x,μ)=f(x)+μᵀg(x)와 듀얼 함수 q_L(μ)=inf_{x∈X} L(x,μ) 를 정의한다. Slater 조건에 의해 p* = d*_L이며, 듀얼 최적집합 D*_L는 비공집합이다. 라그랑지안의 saddle‑point (x*,μ*)는 X*×D*_L와 동일함을 보이고, 이를 기반으로 듀얼 변수에 대한 유계 초집합 M을 구성한다(예: 각 에이전트 i의 개별 듀얼 최적값 d*_i를 이용).
DLPDS 알고리즘은 매 시간 k마다 각 에이전트 i가 (1) 자신의 x_i(k)와 μ_i(k)를 인접 이웃의 평균값으로 업데이트, (2) 로컬 서브그라디언트 ∇f_i(x_i(k))와 g(x_i(k))에 기반한 서브그라디언트 스텝을 수행, (3) x_i(k+1)을 X_i에 투영, μ_i(k+1)을 M에 투영한다. 스텝 크기 α(k)는 diminishing(∑α(k)=∞, ∑α(k)²<∞) 조건을 만족한다. 수렴 증명은 (i) 평균 합의 프로세스가 시간 가변 그래프에서도 수렴함을 보이는 기존 결과, (ii) 라그랑지안의 convex‑concave 구조를 이용한 saddle‑point 수렴 이론, (iii) 투영 연산으로 인해 서브그라디언트가 유계임을 이용한다. 결과적으로 모든 에이전트는 동일한 원시 최적점 x*와 듀얼 최적점 μ*에 수렴하고, 동적 평균 합의를 통해 전역 최적값 p*를 정확히 추정한다.
**Case II: 로컬 제약집합이 동일하고 등식 제약이 존재하는 경우**
문제 (1) 전체를 다루기 위해 페널티 함수 Φ(x,λ)=f(x)+λᵀg(x)+ρ‖h(x)‖² 를 도입한다. 여기서 ρ>0는 페널티 파라미터이며, 등식 제약을 완화한다. 페널티 듀얼 함수 q_P(λ)=inf_{x∈X} Φ(x,λ) 를 정의하고, λ≥0에 대한 최대화 문제를 듀얼로 설정한다. 등식 제약이 선형이므로 h(x)=Ax−b 형태이며, 페널티 항은 강한 convexity을 제공한다.
DPPDS 알고리즘은 DLPDS와 구조는 유사하지만, 듀얼 변수 λ_i(k) 에 대한 투영을 생략한다. 대신 스텝 크기 α(k)와 β(k) (λ 업데이트용)를 서로 다른 감소 속도로 설계하여, λ_i(k) 가 발산하지 않도록 제어한다. 구체적으로, α(k)=c/(k+1)ᵃ, β(k)=c'/(k+1)ᵇ 로 설정하고, a∈(0.5,1], b∈(0.5, a] 를 만족한다. 이렇게 하면 λ_i(k) 가 bounded는 아니지만, Φ(x_i(k),λ_i(k)) 의 감소와 함께 원시 변수 x_i(k) 가 최적점 x* 로 수렴한다는 것을 보인다.
수렴 분석은 (1) 페널티 함수가 convex‑concave 구조를 유지함을 이용한 saddle‑point 이론, (2) λ 업데이트에 대한 추가적인 Lyapunov 함수 구성, (3) 시간 가변 그래프에 대한 평균 합의 수렴 결과를 결합한다. 최종적으로 모든 에이전트는 동일한 원시 최적점 x*에 수렴하고, 전역 최적값 p*를 정확히 추정한다.
**기술적 기여와 의의**
1. 부등식·등식 제약을 동시에 다루는 두 가지 분산 primal‑dual 프레임워크를 제시, 기존 연구가 다루던 단일 부등식 혹은 동일 제약집합 가정만을 확장.
2. 시간에 따라 변하는 비대칭 가중치 그래프에서도 주기적 강연결성만으로 수렴을 보장, 고정 혹은 완전 그래프 가정이 필요 없음.
3. Slater 조건만으로 듀얼 변수의 유계성을 확보하거나, 유계가 불가능한 경우에도 스텝 크기 설계로 수렴을 유지.
4. 동적 평균 합의 메커니즘을 활용해 전역 최적값을 실시간으로 추적, 기존 정적 평균 합의 대비 실용성 향상.
5. 각 에이전트가 로컬 목적·제약과 인접 이웃 변수만 교환하므로 통신 부하가 낮고, 확장성이 뛰어남.
**실험 및 시뮬레이션**
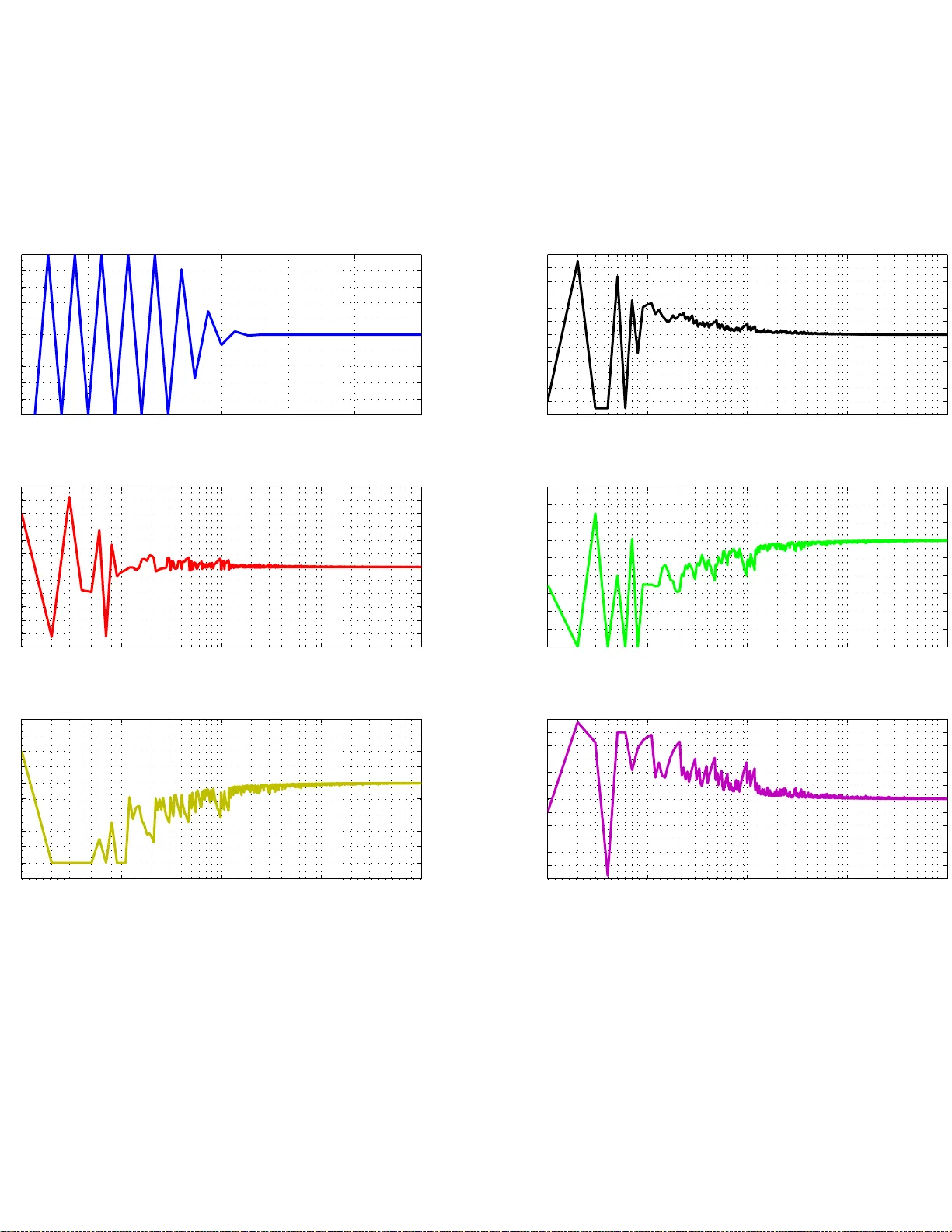
논문에서는 수치 실험으로 (i) 무선 센서 네트워크에서 전력 소비 최소화 문제, (ii) 로봇 군집에서 형상 유지와 충돌 회피를 동시에 만족하는 최적 경로 계획 문제를 다룬다. 변동 그래프와 다양한 초기 조건에서도 DLPDS와 DPPDS가 각각 전역 최적값에 수렴함을 그래프와 수렴 곡선으로 보여준다. 특히 DPPDS는 듀얼 변수의 발산 현상이 관찰되지만, 원시 변수는 안정적으로 최적점에 도달함을 확인한다.
**결론**
본 연구는 분산 최적화 분야에서 부등식·등식 제약을 동시에 고려한 primal‑dual 서브그라디언트 방법을 체계적으로 제시하고, 시간 가변 네트워크에서도 강연결성 가정 하에 수렴을 보장한다는 이론적·실험적 증거를 제공한다. 향후 연구는 비선형 등식 제약, 비동기 업데이트, 그리고 사생활 보호(privacy‑preserving) 메커니즘을 포함한 확장으로 이어질 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기