완전 유체 속 3차원 스위머의 일반적 제어 가능성
** 본 논문은 무점성·비압축성 유체 안에서 형태 변화를 통해 움직이는 3차원 물체(스위머)의 운동 방정식을 수학적으로 모델링하고, 두 가지 주요 제어 결과를 증명한다. 첫 번째는 ‘동기화 수영’으로, 밀도와 초기 형태를 아주 작은 정도만 조정하면 임의의 궤적과 형태 변화를 거의 정확히 따라갈 수 있음을 보인다. 두 번째는 ‘프리스타일 수영’으로, 다섯 개의 기본 변형만을 적절히 조합하면 어떤 궤적도 근사적으로 구현할 수 있음을 제시한다. …
저자: Thomas Chambrion (INRIA Lorraine / IECN / MMAS, IECN), Alex
**
본 논문은 무점성·비압축성 완전 유체 안에서 형태 변화를 통해 이동하는 3차원 물체, 즉 ‘스위머’의 운동을 수학적으로 모델링하고, 그 제어 가능성을 일반적인 관점에서 분석한다.
1. **모델링 기반**
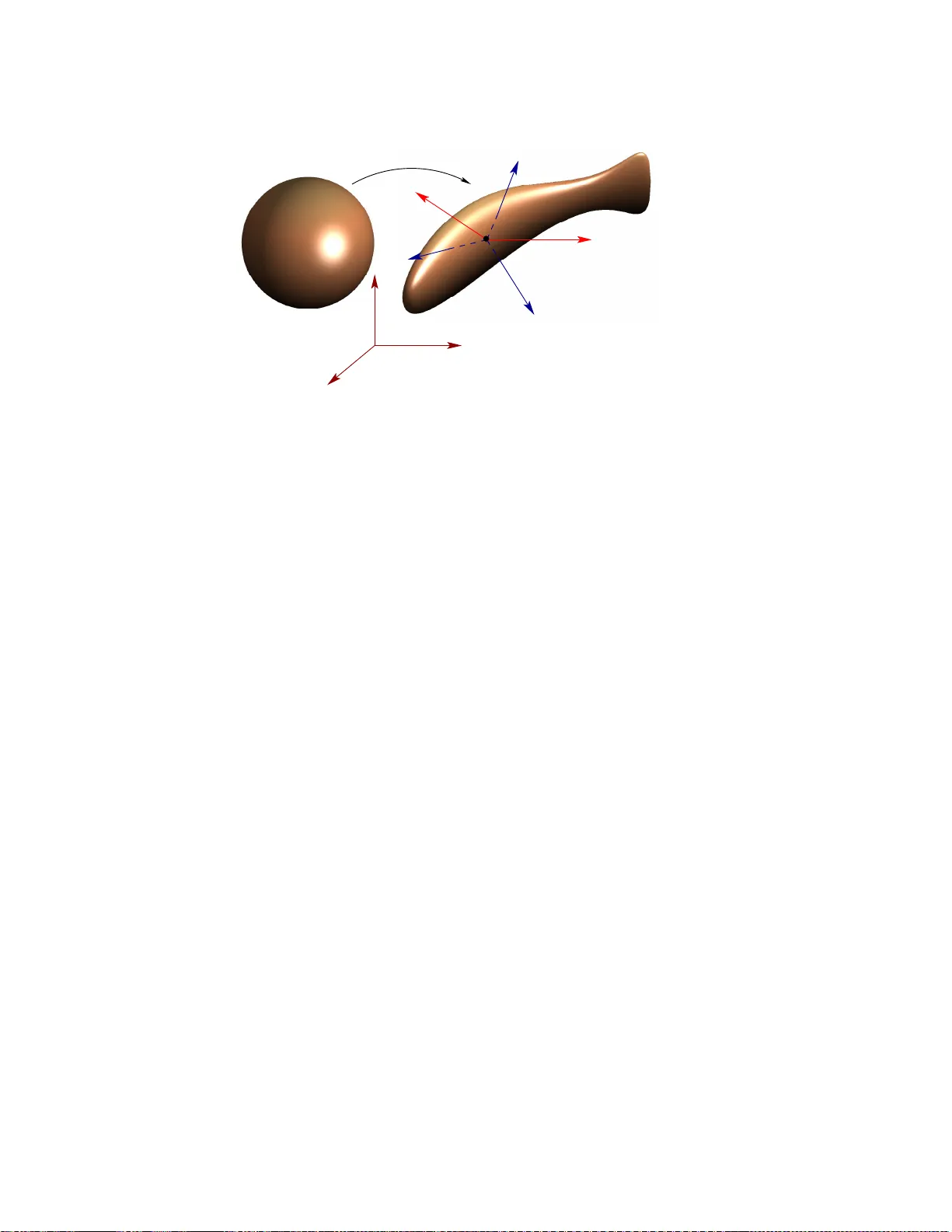
- 두 개의 좌표계 E(고정)와 e(이동)를 도입하고, 스위머의 위치와 자세를 회전 행렬 R(t)∈SO(3)와 평행 이동 r(t)로 기술한다.
- 선속도 v와 각속도 Ω는 R(t)와 r(t)의 시간 미분을 통해 정의된다.
- 형태 변형은 단위 구 \(\bar B\) 의 C¹‑디퓨오몰피즘 \(\Theta_t=Id+\vartheta_t\) 로 표현되며, \(\vartheta_t\)는 D¹₀(ℝ³) 공간에 속한다.
- 자기구동 제약식(1.2)은 질량 중심과 각운동량이 변형 과정에서 보존되도록 하는 적분식으로, 내부 힘만으로 변형한다는 물리적 가정을 반영한다.
2. **유체와 상호작용**
- 유체는 무점성·비압축성 가정 하에 Euler 방정식으로 기술된다. 초기 무회전이면 전체 흐름이 무회전성을 유지한다.
- 따라서 유체 속도는 포텐셜 \(\phi\)와 \(\psi_i\) (6개의 기본 포텐셜)로 표현된다. 각 포텐셜은 무한대에서 0으로 수렴하고, 경계 \(\Sigma_t\) 에서 Neumann 조건을 만족한다.
- 포텐셜을 이용해 유체와 몸체 사이의 상호작용을 질량 행렬 \(M_r(t)=M_{rb}(t)+M_{rf}(t)\)와 교차항 \(N(t)\)로 정량화한다. 여기서 \(M_{rb}\)는 몸체 자체 질량·관성을, \(M_{rf}\)는 유체에 의해 유도된 추가 관성 효과를 포함한다.
3. **동역학 방정식**
- 최종 동역학은 \(\dot{\Omega},\dot{v}= -M_r^{-1}(t)N(t)\) 형태의 ODE(식 1.6)로 정리된다. 제어 입력은 형태 변형 \(\vartheta_t\)이며, 변형이 바뀔 때마다 유체 영역 \(F_t\)와 포텐셜이 재계산되어 질량 행렬이 실시간으로 변한다.
- Proposition 1.1은 주어진 \(\vartheta_t\)에 대해 전역 해가 존재하고, 입력‑출력 매핑이 연속임을 보인다.
4. **스위머 구성(SC) 정의**
- 무한 차원 매니폴드 \(C(n)\)를 정의한다. 각 원소는 밀도 \(\rho\), 기본 변형 \(\vartheta\), 그리고 \(n\) 개의 독립적인 기본 변형 \(V_i\) (각각 C¹₀(ℝ³) 함수)로 이루어진다.
- 모든 \(V_i\)와 \(\Theta\)는 자기구동 제약을 만족하고, 질량·관성 보존 조건을 만족한다.
- 이 매니폴드는 스위머의 모든 가능한 물리적·기하학적 구성을 포괄한다.
5. **제어 가능성 분석**
- 질량 행렬과 교차항을 매개변수 \(c\in C(n)\) 에 대한 해석적 함수로 본다.
- 기하 제어 이론의 Lie‑bracket 전파 원리를 적용해, 제어 벡터필드 \(f_i(c)\)와 그들의 Lie 괄호가 전역적으로 스팬을 형성하면 시스템이 완전 제어 가능함을 증명한다.
- 구체적인 ‘특수 스위머’ 사례를 구성해, 해당 스위머가 위 조건을 만족함을 직접 계산한다. 해석적 함수의 영점이 비자명하게 존재함을 이용해, 매니폴드 \(C(n)\) 내 거의 모든 점이 동일한 제어 가능성을 공유한다는 일반화된 결론을 도출한다.
6. **주요 정리**
- **동기화 수영(Theorem 1.2)**: 목표 밀도 \(\bar\rho\)와 목표 형태 \(\bar\vartheta(t)\)를 아주 작은 오차 \(\varepsilon\) 이내로 조정하고, 초기·최종 형태를 동일하게 유지하면서, 임의의 목표 궤적 \((\bar R(t),\bar r(t))\)을 근사적으로 따라갈 수 있다. 제어는 매우 작은 ‘초과 변형’만을 추가하면 된다.
- **프리스타일 수영(Theorem 1.3)**: 다섯 개의 기본 변형 \(V_1,\dots,V_5\) 만을 적절히 조합해, 목표 궤적을 근사적으로 구현할 수 있다. 여기서도 밀도는 아주 작은 정도만 조정하면 된다.
7. **의의와 전망**
- 기존 2차원 연구를 3차원으로 확장하면서, 완전 유체 환경에서도 일반적인 스위머가 원하는 움직임을 구현할 수 있음을 수학적으로 증명했다.
- ‘동기화’와 ‘프리스타일’ 두 가지 제어 전략은 실제 로봇 수영체 설계에 적용 가능성을 제공한다. 특히 프리스타일 전략은 제한된 기본 변형만으로도 복잡한 궤적을 구현할 수 있어, 하드웨어 구현 비용을 크게 낮출 수 있다.
- 향후 연구는 점성·난류 효과를 포함한 보다 현실적인 유체 모델, 그리고 실험적 검증을 통해 이론과 실제 사이의 격차를 메우는 방향으로 진행될 수 있다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기