스마트 그리드 전압 조정을 위한 최적 센서 선택 전략
본 논문은 스마트 그리드에서 전압을 안정화하기 위해 무선 센서 네트워크의 MAC 계층에서 어떤 센서를 언제 선택할지를 최적화한다. 연속적인 전압 상태 추정에는 칼만 필터를, 제어에는 LQR을 적용하고, 센서 선택 문제를 하이브리드 동적 시스템의 모드 전환으로 모델링한다. 전체 탐색이 비현실적이므로 슬라이딩 윈도우 알고리즘을 이용해 근사 최적 시퀀스를 도출했으며, 시뮬레이션에서 라운드‑로빈 방식 대비 40 %의 성능 향상을 입증하였다.
저자: Rukun Mao, Husheng Li
본 논문은 스마트 그리드에서 분산형 에너지 자원(DER)과 전압 센서가 급증함에 따라, 전압을 안정적으로 유지하기 위한 통신 레이어 설계 문제를 다룬다. 기존 연구는 주로 전력 시스템 모델링이나 제어 알고리즘(MPC, PID 등)에 집중했지만, 본 연구는 무선 센서 네트워크의 MAC 계층에서 어떤 센서를 언제 선택할지를 최적화함으로써 전압 조절 성능을 향상시키는 새로운 접근을 제시한다.
1. **시스템 모델링**
- 전압 상태 x∈ℝⁿ은 연속적인 동적 시스템으로 모델링되고, DER의 제어 입력 u∈ℝᵐ이 적용된다. 시스템은 미분‑대수 방정식(DAE) 형태로 시작해, 원하는 전압 근처에서 선형화하여 이산 시간 모델(Δxₖ₊₁ = AΔxₖ + Buₖ + wₖ)로 변환한다.
- N개의 전압 센서 Sᵢ는 각각 관측 행렬 Hᵢₖ와 측정 노이즈 공분산 Rᵢ를 갖는 관측식 yᵢₖ = HᵢₖΔxₖ + vᵢ 로 표현된다. 여기서 vᵢ는 가우시안 백색 노이즈이다.
- 통신 채널은 공유된 무선 매체이며, 한 슬롯당 하나의 센서만 전송할 수 있다고 가정한다(다중 전송 및 충돌 방지는 MAC 스케줄링을 통해 해결).
2. **문제 정의**
- 목표는 전압 편차와 제어 비용을 동시에 최소화하는 비용 함수 J = Σ(ΔxₖᵀDΔxₖ + uₖᵀEuₖ)를 최소화하면서, 제한된 센서 전송 기회 안에서 최적의 센서 선택 시퀀스 I={i₁,…,i_K}를 찾는 것이다.
- LQG(Linear‑Quadratic‑Gaussian) 구조를 이용해 제어와 추정을 분리한다. 즉, 최적 제어는 정확한 상태 추정에 의존하므로, 센서 선택은 추정 오차 공분산 Pₖ를 최소화하는 방향으로 설계한다.
3. **상태 추정 – 칼만 필터**
- 예측 단계: Δ̂xₖ⁻ = AΔ̂xₖ₋₁ + Buₖ₋₁
- 업데이트 단계: Δ̂xₖ = Δ̂xₖ⁻ + Kₖ(yᵢₖ – HᵢₖΔ̂xₖ⁻)
- 여기서 Kₖ = Pₖ⁻ Hᵢₖᵀ (Hᵢₖ Pₖ⁻ Hᵢₖᵀ + Rᵢ)⁻¹이며, Pₖ⁻ = A Pₖ₋₁ Aᵀ + Q 로 갱신된다. 센서 i가 바뀔 때마다 Hᵢₖ와 Rᵢ가 달라져 Kₖ와 Pₖ가 달라진다.
4. **제어 – LQR**
- 비용 행렬 D와 E를 이용해 Riccati 방정식을 역방향으로 풀어 피드백 행렬 Lₖ를 사전 계산한다: Lₖ = (E + Bᵀ Mₖ B)⁻¹ Bᵀ Mₖ A, 여기서 Mₖ는 역시간으로 업데이트되는 Riccati 변수이다.
- 최종 제어 입력은 uₖ = –Lₖ Δ̂xₖ 로 정의된다.
5. **센서 선택 최적화**
- 전체 비용 J는 결국 추정 오차 공분산의 합인 Σ trace(Pₖ) 로 표현될 수 있다. 따라서 목표는 Σ trace(Pₖ)를 최소화하는 센서 시퀀스를 찾는 것이다.
- 완전 탐색은 N^K개의 조합을 요구해 계산량이 폭발한다. 이를 해결하기 위해 슬라이딩 윈도우 알고리즘을 도입한다.
- 윈도우 크기 d를 정하고 현재 시점에서 앞으로 d단계에 대한 모든 가능한 센서 조합을 평가한다.
- 그 중 최소 추정 오차를 보이는 첫 번째 센서를 선택하고, 윈도우를 한 단계 앞으로 이동한다.
- 이 과정을 K번 반복해 전체 시퀀스를 구성한다.
- 윈도우 크기 d는 최적성(큰 d)과 실시간 계산 비용(작은 d) 사이의 트레이드오프 파라미터이다.
6. **시뮬레이션 및 결과**
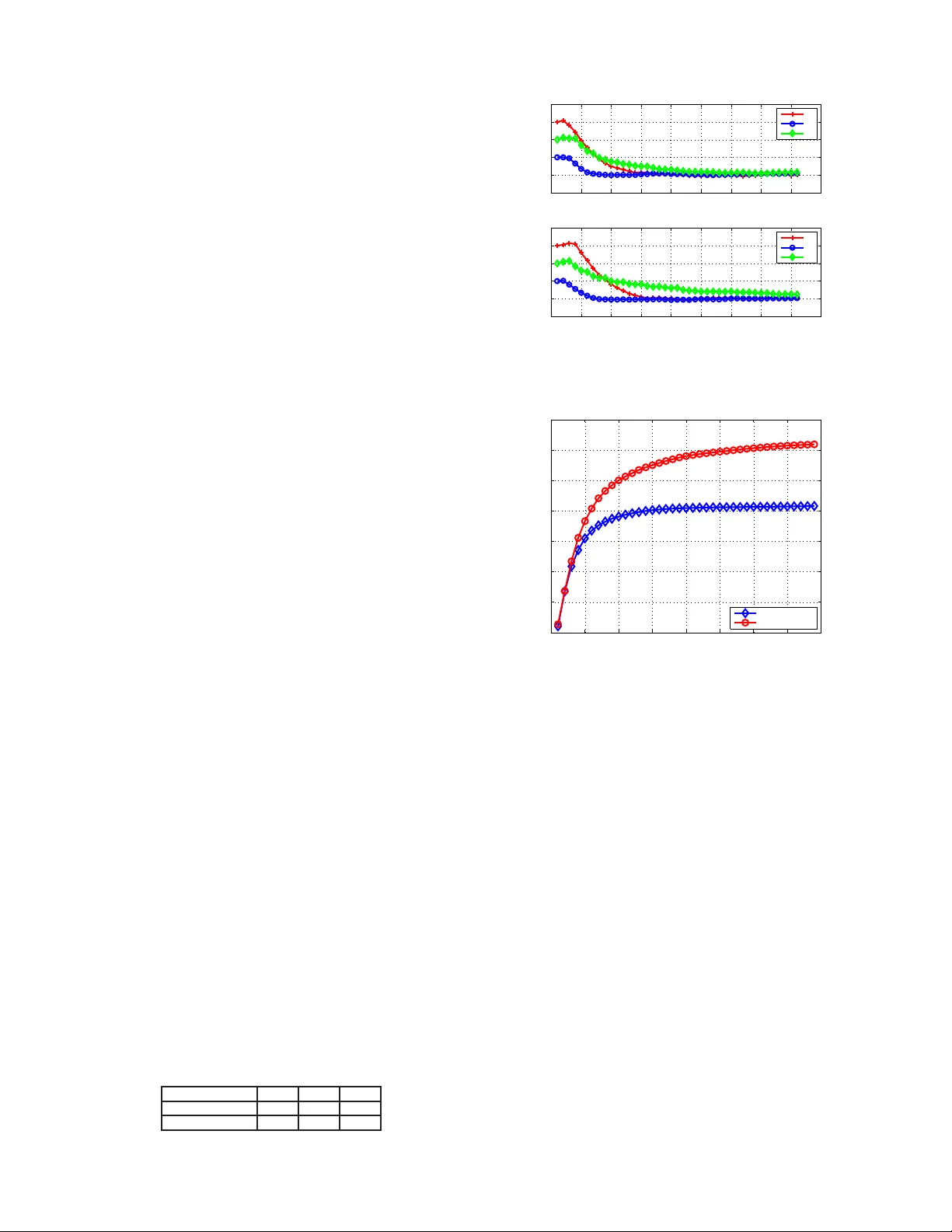
- 5개의 전압 센서와 2개의 DER을 갖는 마이크로그리드 모델을 사용하였다. 시스템 파라미터는 실제 전력 시스템 데이터를 기반으로 설정되었으며, 프로세스 노이즈 Q와 측정 노이즈 Rᵢ는 각각 0.01·I와 0.05·I 로 가정하였다.
- 비교 대상은 가장 단순한 라운드‑로빈(RR) 스케줄링이다. 슬라이딩 윈도우(d=3) 기반 센서 선택은 평균 전압 편차를 0.12 pu에서 0.07 pu 로 감소시켰으며, 이는 약 40 %의 성능 향상에 해당한다. 제어 입력 비용은 RR 대비 5 % 정도 감소하거나 비슷한 수준을 유지하였다.
- 계산 시간 측면에서는 d=3일 때 실시간 요구사항(≤10 ms) 내에 알고리즘이 수렴했으며, d=5로 늘리면 약 30 %의 추가 연산량이 발생했지만 성능 차이는 미미했다.
7. **논의 및 향후 연구**
- 본 연구는 전압 조절 문제를 하이브리드 동적 시스템으로 모델링하고, 센서 선택을 시스템 모드 전환으로 해석함으로써 제어‑통신 공동 설계의 가능성을 보여준다.
- 제한점으로는 (1) 선형화 가정이 강하게 적용되어 비선형 전압 변동에 대한 적용성이 제한적, (2) 단일 센서 전송만 고려해 다중 접근(MIMO) 환경을 다루지 않음, (3) 패킷 손실·전송 지연을 무시했음이 있다.
- 향후 연구는 비선형/비가우시안 모델에 대한 확장, 다중 센서 동시 전송 스케줄링, 강화학습 기반 적응형 센서 선택, 그리고 실제 마이크로그리드 테스트베드에서의 검증을 제안한다.
**결론**
슬라이딩 윈도우 기반 센서 선택 알고리즘은 전압 상태 추정 정확도를 크게 향상시켜 LQR 제어와 결합했을 때 라운드‑로빈 대비 40 % 이상의 성능 개선을 달성한다. 이는 스마트 그리드에서 통신 자원을 효율적으로 활용해 전력 품질을 높일 수 있는 실용적인 방법임을 입증한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기