분산 형성 제어의 정보 흐름과 특이점: 전역 안정성의 대수적 관점
본 논문은 부분 정보를 가진 자율 에이전트들이 목표 형성을 전역적으로 안정화할 수 있는지 여부를 대수적·위상학적 방법으로 분석한다. 특히 4개의 에이전트로 이루어진 2‑사이클(Directed 2‑cycles) 형성에 대해, 제한된 정보 흐름 하에서는 어떤 피드백 법칙도 모든 목표 구성을 동시에 안정화하거나 원치 않는 추가 균형을 방지할 수 없음을 증명한다.
저자: M.-A. Belabbas
본 논문은 “분산 형성 제어”라는 문제를 두 차원 평면에서 n개의 자율 에이전트가 목표 거리 제약을 만족하는 특정 형성을 달성하도록 하는 제어법을 설계할 때, 각 에이전트가 갖는 정보의 양과 구조가 얼마나 중요한지를 대수적·위상학적 관점에서 체계적으로 분석한다.
첫 번째 파트에서는 형성 공간 자체의 위상 구조를 살펴본다. Part I에서 증명한 바와 같이, n개의 에이전트가 정의하는 거리 제약 집합은 복소 사영공간 CP^{n‑2}와 동형이며, 이는 비자명한 호몰로지와 비정상적인 Euler 특성을 가진다. 이러한 위상적 특성은 전통적인 전역 안정성(단일 평형) 정의와 충돌한다. 따라서 저자는 “type‑A 안정성”이라는 새로운 개념을 도입한다. 여기서는 설계 목표 집합 E_d (예: 목표 거리 제약을 만족하는 모든 형성)와 실제 시스템이 가질 수 있는 평형 집합 E 을 구분하고, E_s⊆E_d (모든 안정 평형이 설계 목표에 포함)인 경우를 type‑A stable, E_s=E_d 인 경우를 strongly type‑A stable라 정의한다.
두 번째 파트에서는 부분 정보를 가진 에이전트들의 행동 가능 범위를 함수 공간의 교집합 문제로 전환한다. 각 에이전트 i가 관측할 수 있는 변수 x_i (예: 인접 에이전트와의 거리 벡터)와 제어 입력 u_i(x_i) 를 매끄러운 실함수로 모델링한다. 목표는 오류 함수 p(x+y)=0 (예: 거리 오차가 0)과 시스템이 구현할 수 있는 형태 u_1(x)·u_2(y)=0 이 동등하도록 하는 것이다. 두 함수 집합이 교차하지 않으면 목표를 달성할 수 없으며, 이는 대수적 불가능성으로 귀결된다. 저자는 이 과정을 구체화하기 위해 그뢰브너 기저와 같은 계산대수 도구를 활용한다.
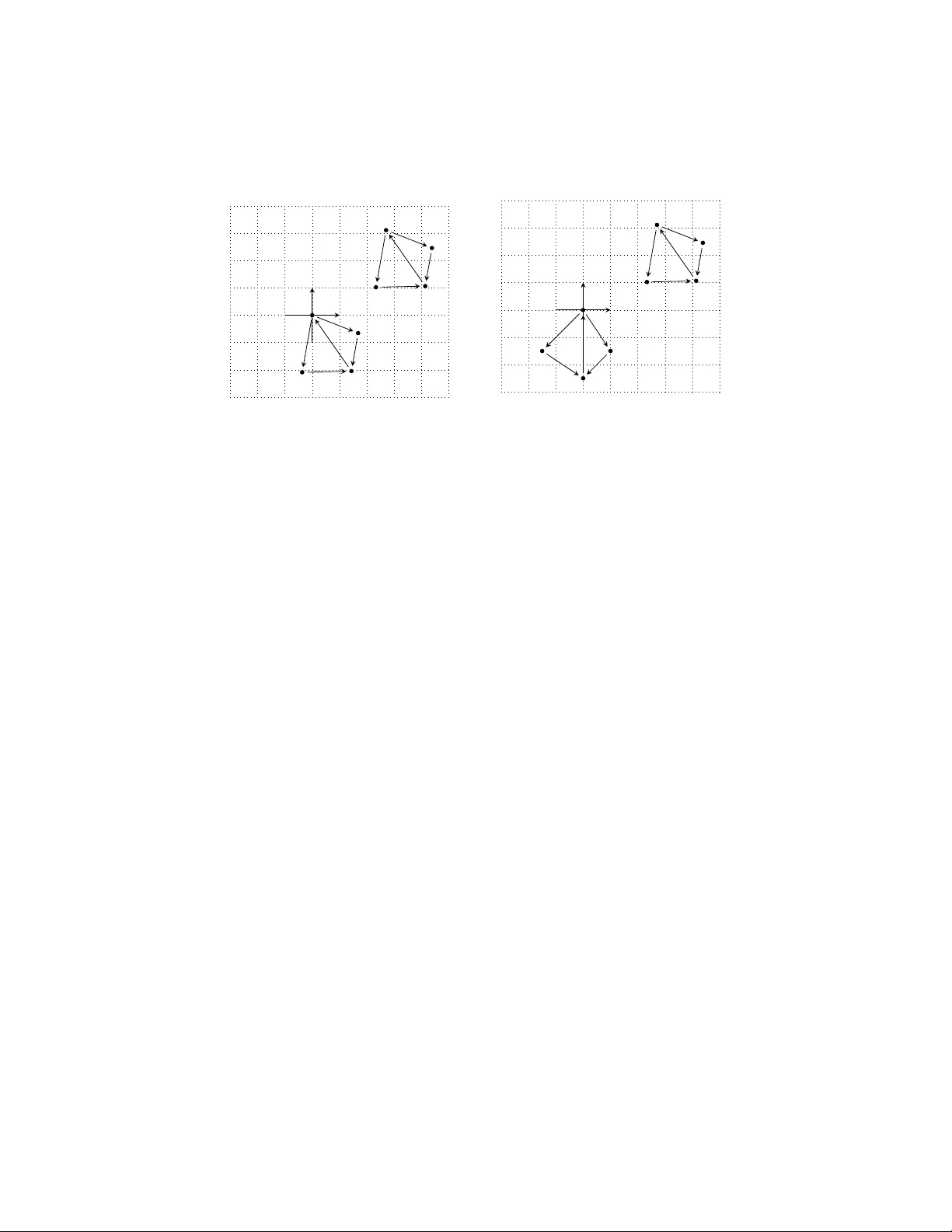
핵심 사례 연구는 4개의 에이전트와 5개의 거리 제약으로 구성된 “2‑사이클” 형성이다. 이 형성은 Part I에서 네 개의 서로 다른 평면 형성이 존재함을 보였으며, 이는 회전·이동에 대한 동등류를 고려한 결과이다. 시스템 동역학은
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기