이동하는 앙상블 교사와 비학습 가능한 진짜 교사의 온라인 학습
본 논문은 비단조 퍼셉트론인 진짜 교사와 단순 퍼셉트론인 앙상블 교사·학생 사이의 위계적 온라인 학습을 통계역학적으로 분석한다. 앙상블 교사는 퍼셉트론 학습 규칙으로 진짜 교사로부터 학습하며, 일정 거리에서 회전하는 ‘모바일’ 상태에 도달한다. 학생은 고정된 앙상블 교사와 비교했을 때, 이동하는 앙상블 교사로부터 배울 때 일시적으로 더 낮은 일반화 오차를 보이며, 특히 학습률이 작을 때 그 효과가 두드러진다.
저자: Takeshi Hirama, Koji Hukushima
본 논문은 온라인 학습 환경에서 ‘진짜 교사’를 직접적으로 접근할 수 없는 상황을 가정하고, 대신 진짜 교사로부터 학습한 여러 앙상블 교사들을 매개로 학생 퍼셉트론이 학습하도록 설계된 위계적 모델을 제시한다. 진짜 교사는 비단조 퍼셉트론 형태를 가지며, 이는 단순 퍼셉트론이 완전 복원할 수 없는 구조적 복잡성을 내포한다. 앙상블 교사 K개는 각각 퍼셉트론 학습 규칙을 사용해 진짜 교사의 출력(o)과 입력(x)에 기반해 가중치를 업데이트한다. 이 과정에서 앙상블 교사들은 ‘모바일’ 상태에 도달한다. 즉, 오더 파라미터 R_B(=A·B_k/(‖A‖‖B_k‖)), l_B(=‖B_k‖/‖B_k^0‖), 그리고 교사 간 상관 q_{kk′}=B_k·B_{k′}/(‖B_k‖‖B_{k′}‖)가 일정한 고정값으로 수렴한다. 이러한 고정값은 진짜 교사의 임계값 a에만 의존하며, a=0일 경우 R_B≈0.76, l_B/η_B≈0.93, q≈0.91이 된다.
학생 J는 두 가지 학습 규칙 중 하나를 적용한다. 첫 번째는 Hebbian 학습으로, 입력 x와 앙상블 교사의 출력 sgn(v_B l_B)를 곱해 가중치를 업데이트한다. 두 번째는 퍼셉트론 학습으로, 앙상블 교사의 출력이 진짜 교사의 출력과 일치하지 않을 때만 업데이트가 일어나며, 업데이트 크기는 학습률 η와 Θ 함수에 의해 조절된다. 학생의 오더 파라미터 R_J(=A·J/(‖A‖‖J‖))와 l(=‖J‖/‖J^0‖)는 각각 (3.8)–(3.13)식에 의해 연속적인 시간 t′에 대해 미분 방정식 형태로 기술된다. 일반화 오차 ε_g^J는 R_J와 l만을 변수로 하는 적분식(2.18)으로 정의되며, 따라서 학생의 학습 과정은 R_J와 l의 동역학에 의해 완전히 결정된다.
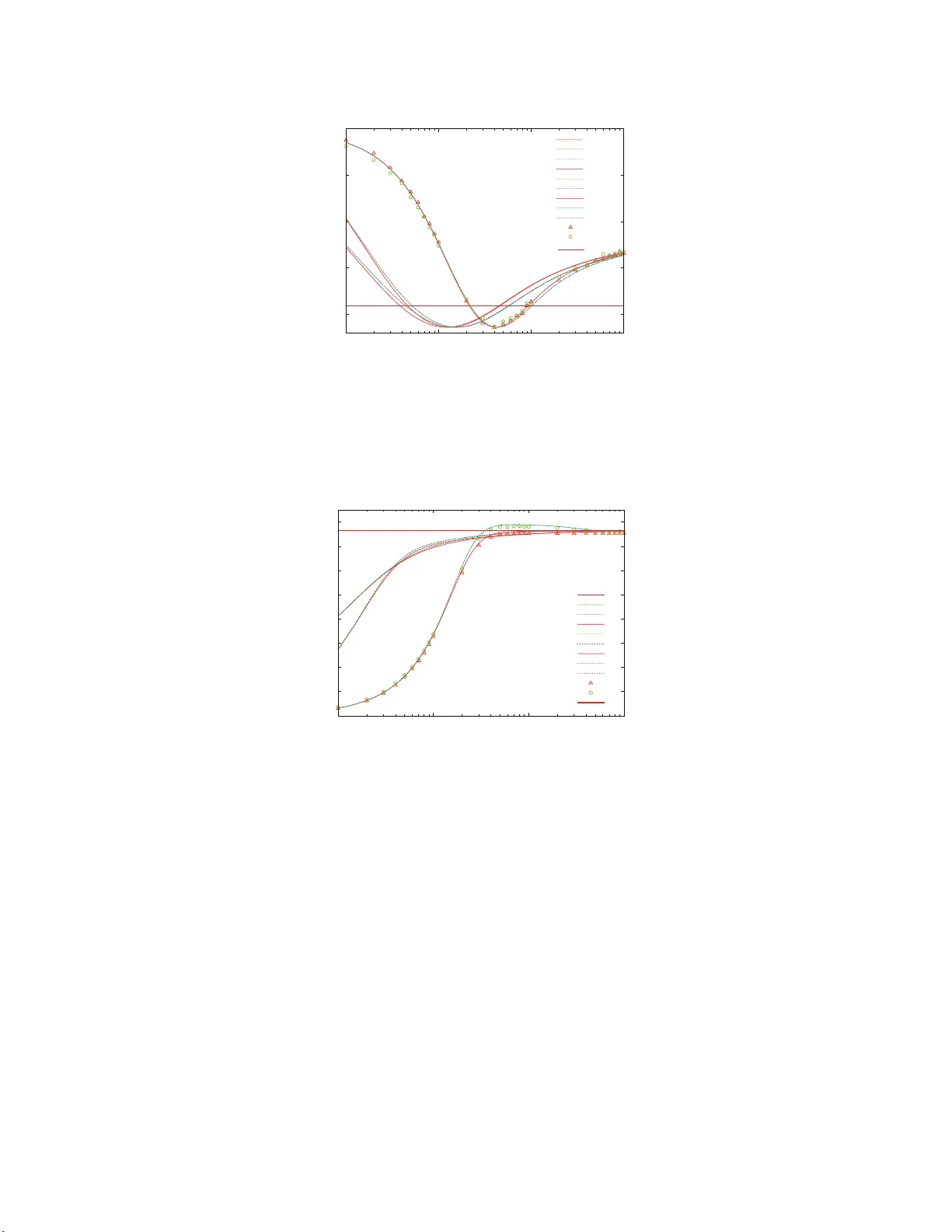
논문은 먼저 앙상블 교사의 동역학을 분석해 고정점(steady state)을 구하고, 이를 학생 학습의 초기 조건으로 사용한다. 이후 두 경우를 비교한다. (1) 앙상블 교사를 고정시켜 학생이 고정된 교사 집합으로부터만 학습하는 경우, (2) 앙상블 교사가 학생과 동일한 입력을 받으며 계속 움직이는 경우. 수치 해석 결과, 학습률 η가 작을수록(예: η=0.1) 학생은 transient 단계에서 앙상블 교사의 일반화 오차보다 낮은 오차를 달성한다. 특히 모바일 앙상블 교사 경우, 초기 학습 속도가 크게 향상되고, 최종 일반화 오차 역시 고정 교사 경우보다 낮게 유지된다. 이는 앙상블 교사의 움직임이 학생의 R_J를 더 빠르게 진짜 교사와 정렬시키는 효과를 갖기 때문이다.
또한, Hebbian 학습과 퍼셉트론 학습 사이의 차이도 분석한다. Hebbian 학습은 일반화 오차가 단조롭게 감소하고 학습률에 무관한 최종값을 보이는 반면, 퍼셉트론 학습은 비단조적이며 학습률이 작을 때 최소값을 나타낸다. 두 경우 모두 모바일 앙상블 교사의 존재가 오차 감소를 가속화한다는 공통된 결론에 도달한다.
결론적으로, 비학습 가능한 진짜 교사와 직접적인 상호작용이 불가능한 상황에서도, 이동하는 앙상블 교사를 매개로 하면 학생이 실제 교사의 구조를 부분적으로 추정하고, 일반화 성능을 크게 향상시킬 수 있음을 보였다. 이는 기존 고정 앙상블 교사 모델에서 간과되던 ‘교사의 모빌리티’가 학습 효율에 미치는 영향을 최초로 정량화한 것으로, 메타러닝, 지식 전이, 그리고 다중 교사 기반 학습 시스템 설계에 중요한 이론적 통찰을 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기