스스로 배치하는 모바일 센서를 위한 P&P 통신 프로토콜
본 논문은 이동형 센서가 지역 전체를 6각형 격자로 자동 커버하도록 하는 PUSH‑PULL 알고리즘을 구현하기 위한 P&P 통신 프로토콜을 제안한다. 센서 간 비동기식 로컬 의사결정을 신뢰성 있게 조율하고, 충돌·통신 손실·노드 고장을 최소 에너지로 해결하도록 설계하였다. 시뮬레이션을 통해 불규칙 영역, 충돌 상황, 노드 실패 등 다양한 환경에서 높은 커버리지와 안정성을 입증한다.
저자: N. Bartolini, A. Massini, S. Silvestri
본 논문은 인간이 직접 배치하기 어려운 위험 지역에서 모바일 센서가 스스로 위치를 조정해 전체 영역을 효율적으로 커버하도록 하는 PUSH‑PULL 알고리즘을 구현하기 위한 통신 프로토콜, 즉 P&P(Probe & Push) 프로토콜을 제안한다. 서론에서는 화재, 재난, 전쟁 지역 등에서 센서가 항공 투하 혹은 원격 발사되는 상황을 설명하고, 기존의 가상 힘, 유체·가스 모델, 보로노이 다이어그램 기반 방법들이 실제 배치 시 통신·충돌 관리에 대한 구체적 설계가 부족함을 지적한다.
PUSH‑PULL 알고리즘은 센서가 동일한 감지 반경 Rₛ를 갖는 정육각형 격자를 목표로 하며, Rₜₓ ≥ √3 Rₛ이면 커버리지와 연결성을 동시에 만족한다. 알고리즘은 네 가지 기본 동작으로 구성된다.
1. **Snap**: 초기 스타터 센서는 임의의 시간에 자신의 현재 위치를 첫 번째 정육각형 중심으로 삼고 ‘스냅’ 상태가 된다. 스냅 센서는 ‘I Am Snapped(IAS)’ 브로드캐스트를 통해 주변 센서(스냅, 슬레이브, 프리)의 정보를 수집한다. 빈 인접 정육각형(VP)마다 가장 가까운 후보 센서에게 ‘Snap Into Position(SIP)’을 전송하고, 후보가 ‘AckSIP’으로 응답하면 해당 위치에 이동시켜 새로운 스냅 센서를 만든다.
2. **Push**: 스냅 센서 p가 자신의 헥사곤 안에 슬레이브가 남아 있을 경우, 인접한 저밀도 스냅 센서 q에게 슬레이브를 이동시키도록 ‘Offer’ 메시지를 보낸다. 이동 조건은 슬레이브 수 차이가 1 이상이면서 ord(p) > ord(q)인 경우이며, ord는 센서 고유 ID를 기반으로 한 순서값이다. q는 ‘AckOffer’으로 수락하고 ‘MoveTo’ 명령을 통해 슬레이브를 실제 이동시킨다. 이 과정은 밀도 균형을 빠르게 맞추어 전체 격자의 균일성을 유지한다.
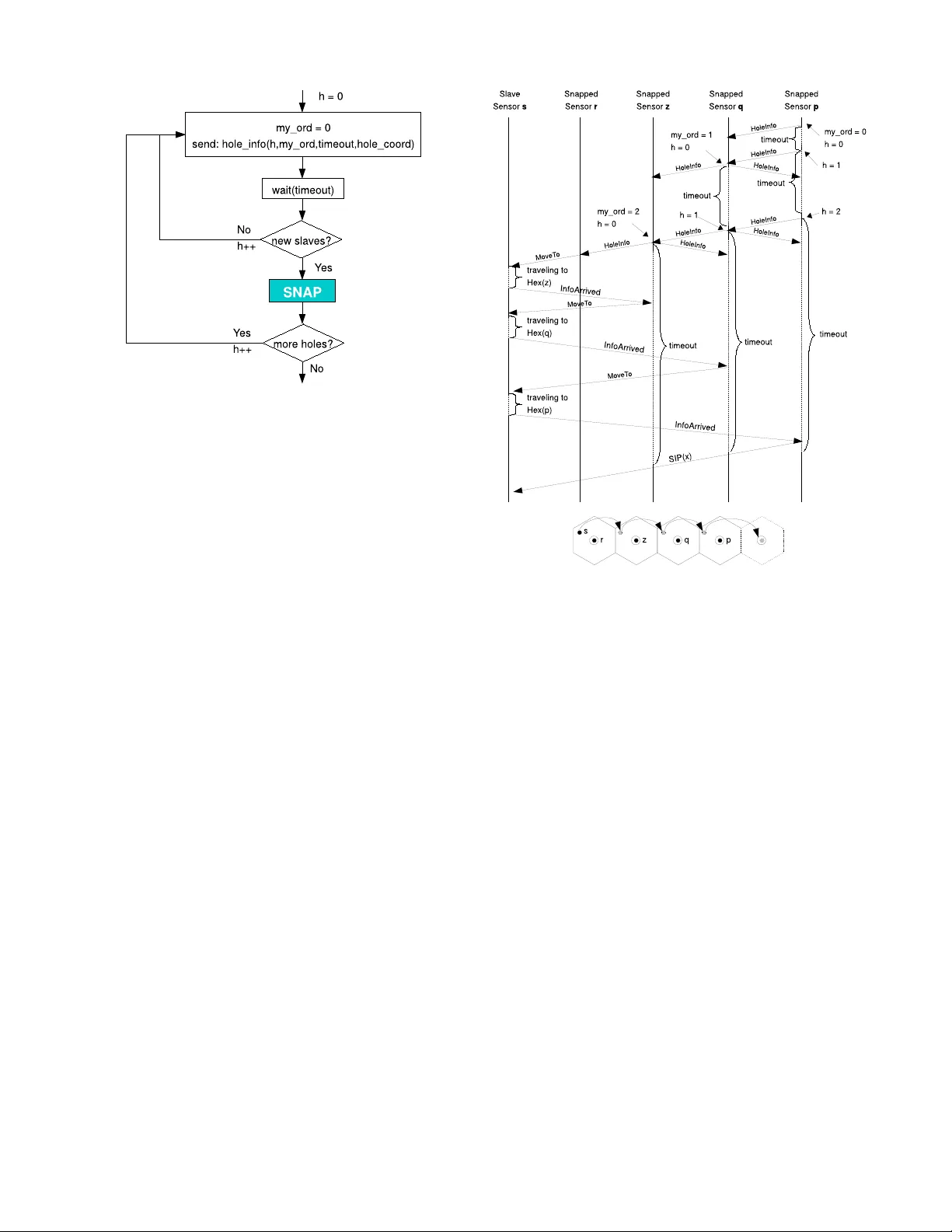
3. **Pull**: 스냅 센서 p가 인접 헥사곤에 커버리지가 부족하고 주변에 슬레이브가 없을 경우, ‘HoleInfo’ 트리거를 발송한다. 트리거를 받은 주변 스냅 센서는 ord 값을 0으로 낮추고 ‘Trigger’ 알림을 전파한다. 트리거는 거리마다 ord 값을 1씩 증가시키며 전파되며, 각 단계마다 타임아웃을 설정해 오래된 트리거는 자동 소멸한다. 이 메커니즘은 다중 구멍 상황에서도 우선순위 큐를 이용해 가장 가까운 구멍을 먼저 해결한다.
4. **Merge**: 여러 스타터 센서가 독립적으로 생성한 격자 조각이 인접하면, 시작 시간이 먼저인 격자가 우선권을 갖고 상대 격자의 스냅 센서는 ‘ClaimPosition’·‘PositionTaken’ 메시지를 통해 새로운 위치로 재배치된다. 이를 통해 전체 네트워크가 하나의 일관된 정렬된 격자로 합쳐진다.
P&P 프로토콜은 위 네 가지 동작을 지원하기 위해 20여 종류의 메시지 타입을 정의한다. 각 메시지는 송신자 ID, 좌표, 타임스탬프, 트랜잭션 ID 등 필수 필드를 포함해 충돌 방지와 재전송을 가능하게 한다. 특히, ‘SIP’·‘AckSIP’, ‘Offer’·‘AckOffer’, ‘MoveTo’, ‘HoleInfo’·‘Trigger’ 등은 충돌 상황에서 타임아웃과 타임스탬프 기반 우선순위 로직을 적용해 동일 목표에 대한 다중 요청을 안전하게 해결한다.
통신 레이어는 패킷 손실과 지연을 감안해 재전송·재시도 메커니즘을 제공한다. 프로토콜 수준에서는 손실된 메시지를 감지하고, 일정 시간 내에 응답이 없으면 해당 트랜잭션을 취소하고 대체 후보를 선택한다. 이를 통해 비동기적이고 불안정한 무선 환경에서도 알고리즘이 정상적으로 진행될 수 있다.
시뮬레이션에서는 다양한 시나리오를 설정했다. (1) 정규 사각형, (2) 불규칙 다각형, (3) 30 % 패킷 손실, (4) 20 % 노드 고장, (5) 동시에 여러 구멍 발생 상황 등이다. 결과는 P&P 프로토콜이 높은 커버리지(> 95 %)와 낮은 에너지 소비(전송 메시지 수 평균 3 개/센서) 를 유지함을 보여준다. 특히, 노드 고장 상황에서도 남은 센서가 자동으로 빈 공간을 메우며 전체 격자 완성 시간이 고장 전 대비 1.3배 정도만 증가했다.
결론적으로, P&P 프로토콜은 PUSH‑PULL 알고리즘을 실제 모바일 센서 네트워크에 적용하기 위한 실용적인 통신 설계이며, 비동기 로컬 의사결정, 충돌 해결, 장애 복구, 에너지 효율성을 모두 만족한다. 향후 연구에서는 실제 하드웨어 구현 및 대규모 현장 시험을 통해 프로토콜의 실시간 성능을 검증하고, 보안·프라이버시 확장을 고려한 확장성을 탐구할 계획이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기