무한소 강체성의 사영 불변성 및 포고레프 변환
이 논문은 두 고전 정리를 새롭게 정리한다. 첫 번째는 다르부와‑소어가 증명한 “무한소 강체성은 사영 변환에 불변이다”는 정리이며, 두 번째는 유클리드 프레임워크와 그 하이퍼볼릭·구면 이미지 사이의 무한소 포고레프 대응을 제시한다. 저자는 정역(정역학)과 운동학을 가상일(work) 원리를 통해 연결하고, 그라스만의 정역 기하학을 이용해 증명을 간결하게 만든다.
저자: Ivan Izmestiev
논문은 크게 네 부분으로 구성된다.
1. **서론(Sections 1‑1, 1‑2, 1‑3)**에서는 무한소 강체성의 기본 개념과 역사적 배경을 소개한다. 프레임워크는 점들의 집합과 일정 거리(바) 제약을 가진 그래프의 직선 드로잉으로 정의되며, 무한소 강체성은 모든 무한소 변위가 전체 공간의 강체 변환에 귀속되는 경우로 설명된다. 저자는 다르부와‑소어 정리와 포고레프 변환이라는 두 고전 정리를 제시하고, 이들이 사영 기하학과 어떻게 연결되는지를 개괄한다.
2. **정역·운동학의 기본 이론(Section 2)**에서는 프레임워크 위의 속도장(Q)과 하중(F)을 정의하고, 가상일 원리(Lemma 2.8)를 통해 Q_mot와 F_res, Q_triv와 F_eq 사이의 직교 관계를 증명한다. 이로부터 Theorem 3이 도출되는데, 이는 “무한소 강체성 ⇔ 정역 강체성”이라는 동치성을 제공한다. 또한, 정역 강체성의 차원 계산을 통해 자유도 수가 d|V| − (d+1 choose 2)임을 보인다(Corollary 2.9).
3. **사영 정역과 사영 운동학(Section 3)**에서는 사영 공간 RP^d에서의 프레임워크 변환을 다룬다. 사영 변환 Φ가 정역 하중을 보존한다는 사실을 Grassmann 외적을 이용해 보여주며, 이에 따라 Darboux‑Sauer 대응이 정의된다. 구체적으로, Φ_kin: Q_mot(P) → Q_mot(Φ(P))가 선형 전단이며, 자명 운동(trivial motions)도 서로 대응한다. 이는 사영 등가 프레임워크가 동일한 무한소 강체성을 갖는다는 정리(Theorem 1)를 즉시 얻는다.
4. **포고레프 변환과 구면·하이퍼볼릭 이미지(Section 4)**에서는 유클리드 디스크 D^d를 켈린 모델을 통해 하이퍼볼릭 공간 H^d와 구면 S^d로 사영한다. 정의된 사영 Π_H와 Π_S는 각각 점을 H^d와 S^d에 대응시키며, 프레임워크 P가 D^d 안에 있을 때 P_H = Π_H(P), P_S = Π_S(P)로 정의한다. Theorem 2는 “P가 무한소 강체 ⇔ P_H와 P_S도 무한소 강체”임을 선언하고, 무한소 포고레프 지도 Φ_Pog를 통해 각 공간의 무한소 운동을 일대일 대응시킨다. 이 변환은 역시 가상일 원리를 이용해 정역 하중이 보존됨을 보이며, 자유도 수가 동일함을 확인한다.
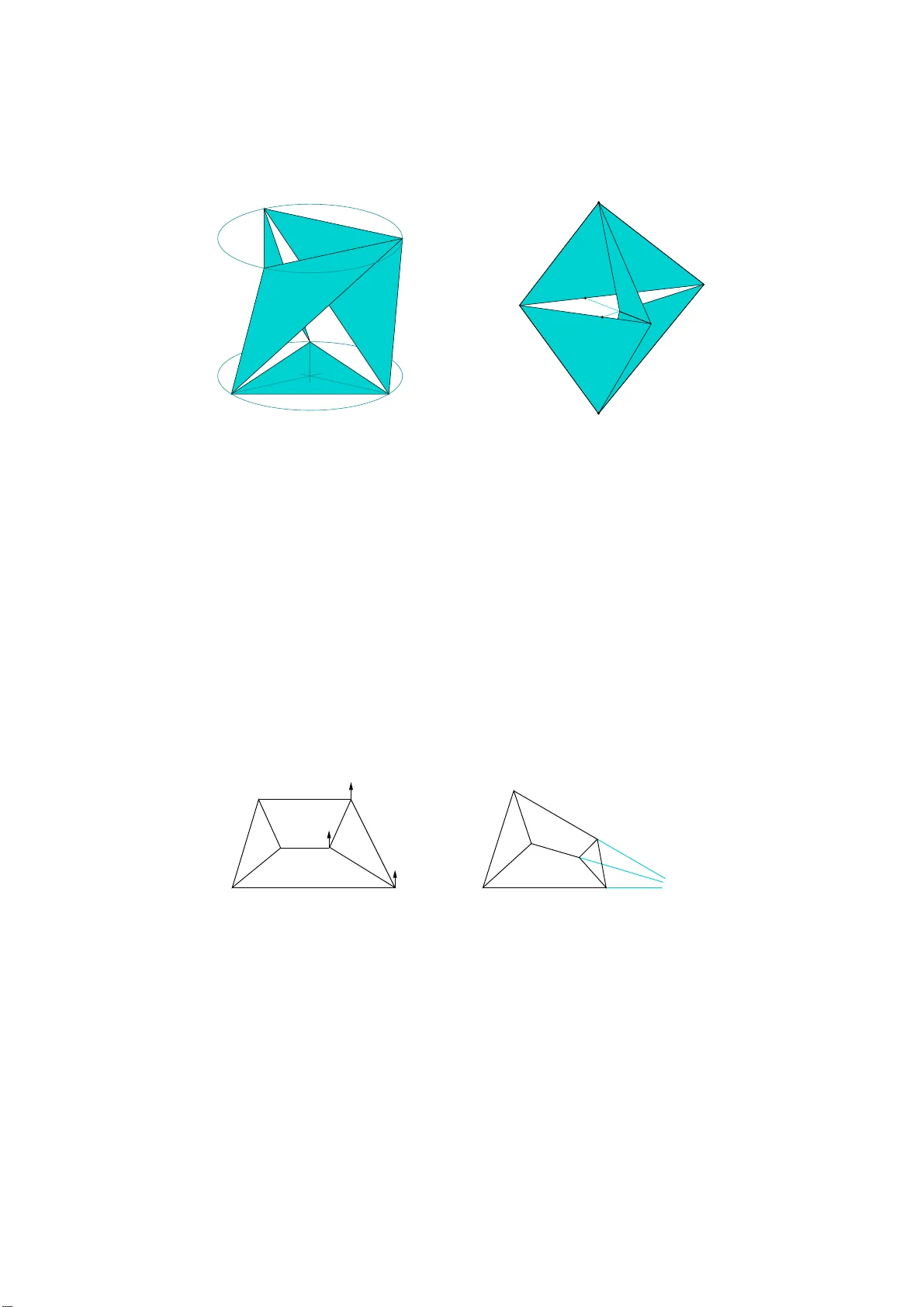
5. **예시와 응용(Section 1‑6 및 예시 1‑3)**에서는 옥타헤드론, 평면 프레임워크, 이분 그래프 위의 프레임워크 등 구체적인 사례를 들어 정리된 정리들을 시각적으로 설명한다. 특히, 사영 불변성을 이용해 비정규 사면체가 구면에 내접하면 무한소 유연함을 보이는 논증이 강조된다.
전체적으로 논문은 정역을 외적·쌍대 관점에서 재해석함으로써 사영 변환이 무한소 강체성에 미치는 영향을 직관적으로 파악한다. 기존의 미분기하학적 증명보다 간결하고 차원·곡률에 독립적인 접근법을 제공하며, 현대의 응용(예: 그래프 이론, 구조 최적화, 컴퓨터 그래픽스)에서도 활용 가능함을 시사한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기