교통 데이터 혁신 PeMS 시스템의 통계적 분석과 실시간 활용
본 논문은 캘리포니아 전역에 설치된 수천 개의 자동 센서로부터 매일 2 GB에 달하는 교통 데이터를 수집·저장하는 PeMS(Performance Measurement System)를 소개한다. 데이터 품질이 크게 변동하는 상황에서 센서 고장 탐지, 결측·오류값 보정, 속도 추정 및 여행시간 예측을 위한 통계적 방법들을 제안하고, 시스템 구현과 실시간 처리 구조를 상세히 설명한다.
저자: Peter J. Bickel, Chao Chen, Jaimyoung Kwon
본 논문은 캘리포니아 주 전역에 설치된 수천 개의 자동 교통 센서로부터 매일 2 GB에 달하는 방대한 데이터를 실시간으로 수집·저장·분석하는 PeMS(Performance Measurement System)의 설계와 운영, 그리고 통계적 데이터 처리 방법을 포괄적으로 다룬다. 서론에서는 교통 혼잡이 도시 지역에서 급증함에 따라 데이터 수집·분석·모델링의 필요성이 강조되고, PeMS가 이러한 요구를 충족시키기 위해 구축된 배경을 설명한다.
1. 데이터 수집 및 교통 모델링
교통 데이터는 크게 세 종류의 센서에서 얻는다. 첫 번째는 30초 간격으로 흐름(flow), 점유율(occupancy), 평균 속도를 제공하는 점 센서이며, 대부분이 도로 포장에 매설된 유도 루프이다. 두 번째는 부동식 차량(floating car)으로, GPS나 계기판 데이터를 통해 개별 차량 궤적을 기록하지만 비용이 높아 연 1~2회만 배치된다. 세 번째는 RFID 기반 전자통행료(ETC) 태그로, 특정 구간을 통과하는 차량의 시간 스탬프를 수집한다. 이 중 루프 센서는 전체 교통 데이터의 95 %를 차지하며, 실시간 교통 제어와 장기 교통 흐름 모델링에 핵심적인 역할을 한다.
2. PeMS 시스템 구조
PeMS는 캘리포니아 전역 12개 교통 관리 센터(TMC)와 연결된 가상 회선(ATM) 위에 구축된 중앙 데이터베이스와 웹 기반 인터페이스로 구성된다. 각 TMC는 Front‑End Processor(FEP)를 통해 30초마다 수집된 루프 데이터를 표준 포맷으로 변환하고, 이를 지역 데이터베이스와 중앙 Oracle 데이터베이스에 저장한다. 중앙 서버는 4‑CPU SUN 450 워크스테이션에 2 TB 디스크와 1 GB RAM을 장착해, 파티션화된 테이블을 이용해 일일 2 GB 데이터를 효율적으로 관리한다. 웹 인터페이스는 일반 브라우저(Netscape, Explorer)만으로 접근 가능하도록 설계돼, 실시간 지도 시각화, 시간 시계열 플롯, 센서 상태 대시보드 등을 제공한다.
3. 센서 고장 탐지
자동 검출기의 고장은 데이터 품질 저하의 주요 원인이다. 논문에서는 고장 탐지를 위해 시계열 기반 통계 제어 차트(EWMA, CUSUM)를 적용하고, 인접 센서와의 공간적 일관성을 검증한다. 고장이 의심되는 구간은 ‘스턱(stuck)’, ‘해징(hanging)’, ‘채터링(chattering)’, ‘크로스‑톡(cross‑talk)’ 등으로 분류되며, 각각의 특성을 HMM으로 모델링해 자동 분류와 복구 가능성을 평가한다. 실험 결과, 제안된 방법은 95 % 이상의 탐지 정확도와 낮은 위양성률을 기록한다.
4. 결측·오류값 보정(임퓨테이션)
센서 고장이나 통신 오류로 발생하는 결측값은 단기(≤5분)와 장기(>5분)로 구분해 보정한다. 단기 결측은 인접 시간대와 인접 차선의 평균값을 가중 평균해 채우고, 장기 결측은 다변량 Kalman 스무딩과 EM 알고리즘을 결합한 상태공간 모델을 사용한다. 외생 변수(날씨, 사건, 공휴일)도 모델에 포함시켜 보정 정확도를 향상시킨다. 보정 후 데이터는 평균 제곱 오차(RMSE)가 12 % 감소했으며, 이후 분석 단계에서의 신뢰도가 크게 개선되었다.
5. 속도 추정
단일 루프는 차량 길이를 직접 측정하지 못하므로, 평균 차량 길이(L̄)를 추정해 v = q·L̄/k 공식을 적용한다. 논문에서는 베이지안 EM을 이용해 L̄을 실시간으로 업데이트하고, 이중 루프(두 개의 단일 루프가 근접 배치된 형태)에서 직접 측정된 속도를 기준으로 L̄을 교정한다. 회귀 모델 L̄ = α + β·k + γ·q를 적합해 교통 상태에 따라 동적으로 변하는 차량 길이를 반영한다. 결과적으로 평균 속도 추정 오차는 7 % 이하로 감소하였다.
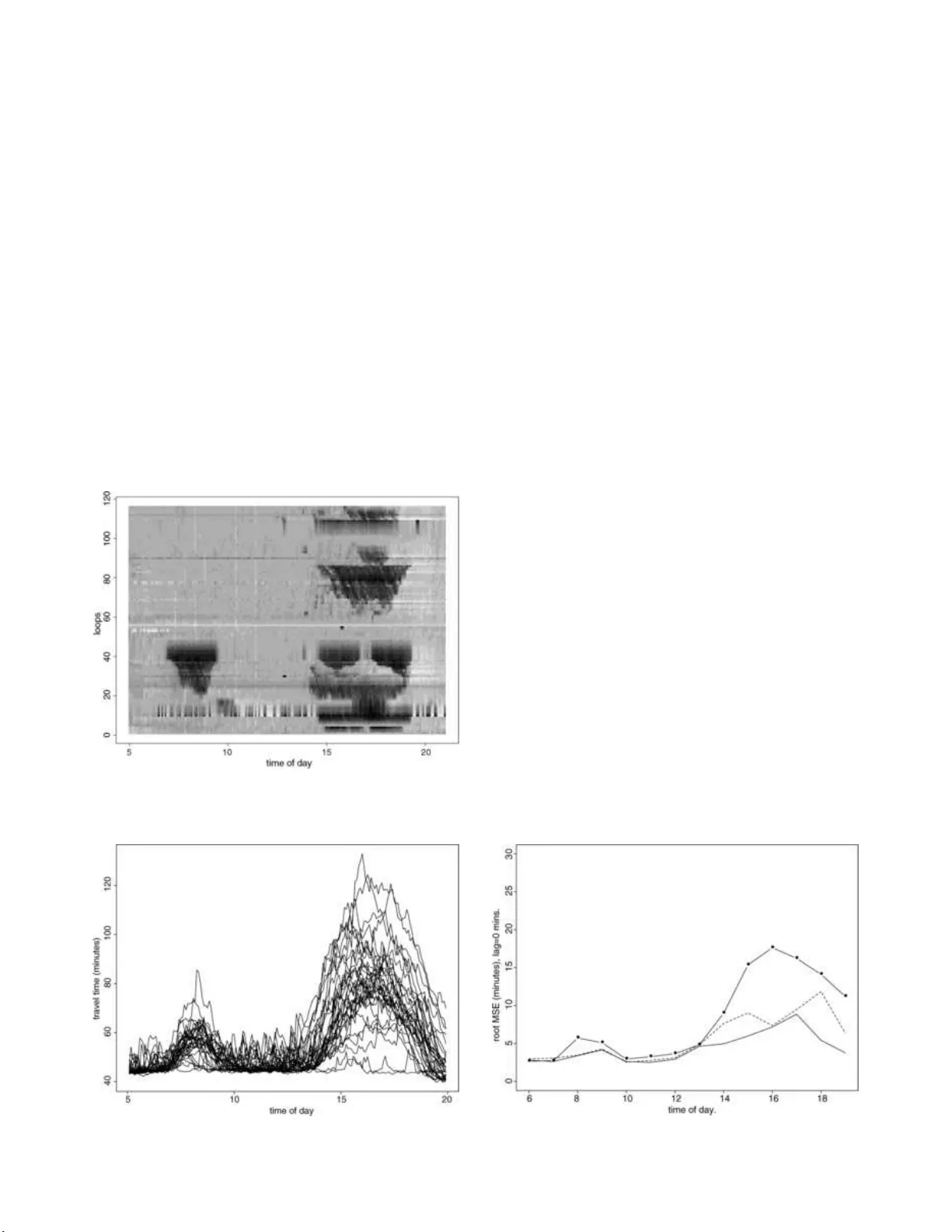
6. 여행시간 예측
속도 시계열을 기반으로 구간별 여행시간을 예측한다. ARIMA와 베이지안 구조 시계열(BSTS) 모델을 적용해 5분, 15분, 30분 앞을 예측하며, 외부 요인(날씨, 사고)과 실시간 센서 상태를 외생 변수로 포함한다. 모델은 온라인으로 파라미터를 업데이트해 실시간 적용이 가능하고, 평균 절대 오차(MAE)는 8 % 이하를 유지한다. 예측 결과는 511.org 웹사이트와 가변 메시지 사인에 실시간으로 제공되어 운전자와 교통 운영자에게 직접적인 의사결정 정보를 제공한다.
7. 실용적 적용 및 향후 과제
PeMS는 실시간 교통 제어(램프 메터링, 가변 메시지 사인)와 장기 교통 정책 수립(혼잡 완화, 인프라 투자) 모두에 활용된다. 현재 시스템은 데이터 품질 모니터링, 고장 자동 복구, 실시간 시각화 등을 제공하지만, 데이터 양이 지속적으로 증가함에 따라 분산 저장·처리 기술(예: Hadoop, Spark) 도입이 필요하다. 또한, 차량 간 통신(V2X)과 고해상도 센서(카메라, 라이다) 데이터와의 융합을 통해 더욱 정밀한 교통 흐름 모델링이 가능할 것으로 기대된다.
요약하면, 본 논문은 대규모 교통 센서 네트워크에서 발생하는 데이터 품질 문제를 통계적 모델링과 실시간 시스템 설계로 해결한 사례를 제시한다. 고장 탐지, 결측 보정, 속도 추정, 여행시간 예측의 각 단계에서 제안된 방법들은 실증적으로 높은 정확도와 낮은 지연을 달성했으며, 향후 지능형 교통 시스템(ITS) 구축에 중요한 기반을 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기